








生成的槽函数关联
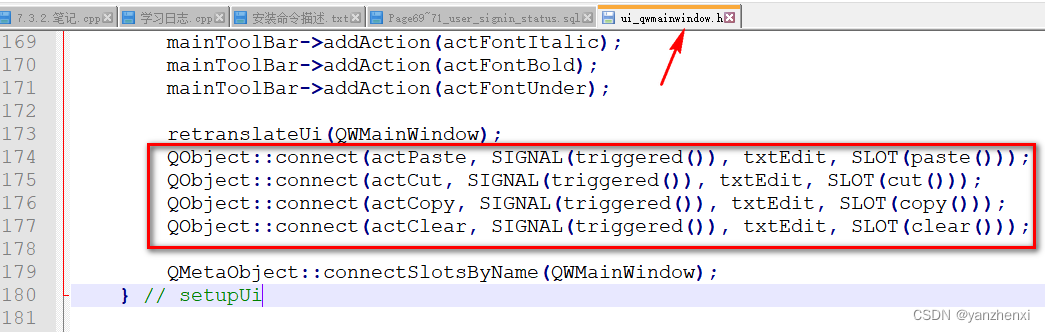
可以看到复制,粘贴功能已经可以用了

设置粗体的槽函数
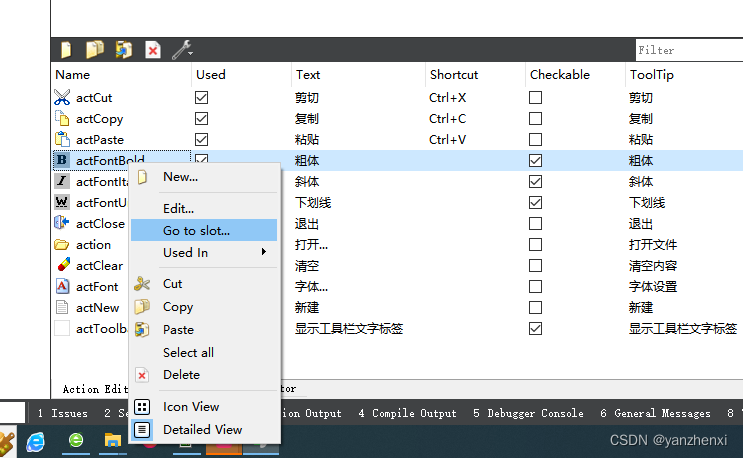

在头文件和源文件生成的槽函数


实现粗体的槽函数

粗体可以用了

同样的方式完成斜体和下划线的槽函数

斜体和下划线成功了


生成的槽函数关联
可以看到复制,粘贴功能已经可以用了
设置粗体的槽函数
在头文件和源文件生成的槽函数
实现粗体的槽函数
粗体可以用了
同样的方式完成斜体和下划线的槽函数
斜体和下划线成功了
 771
771











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言























