







 本文介绍了图像显著性检测的方法,包括基于谱残差和相位谱的两种技术。首先,通过2维离散傅里叶变换及对数谱计算,利用谱残差来识别图像中的异常区域,进而生成显著图。接着,讨论了基于四元傅里叶变换的时空显著性检测。实验结果验证了这些方法的有效性。
本文介绍了图像显著性检测的方法,包括基于谱残差和相位谱的两种技术。首先,通过2维离散傅里叶变换及对数谱计算,利用谱残差来识别图像中的异常区域,进而生成显著图。接着,讨论了基于四元傅里叶变换的时空显著性检测。实验结果验证了这些方法的有效性。
(Saliency Detection: A Spectral Residual Approach)
给定一幅图像,I(x)首先计算其2维离散傅里叶变换,将其从空间域转换到频域,对幅值取对数后得到log谱L(f):
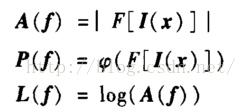
式中F代表2维离散傅里叶变换,I·I代表其幅值,φ代表其相位。
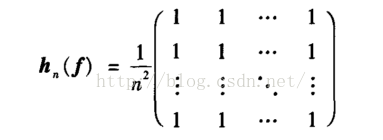
由于log曲线满足局部线性条件,所以用局部平均滤波器hn(f)对其进行平滑,获得log谱的大致形状:

hn(f)是一个nxn矩阵定义为:
因此谱残差就是log谱和其进行均值滤波后的差,可按下面的式子计算:

谱残差能够描述一幅图像中的异常区域,因此可以用来进行显著目标检测。将谱残差和相位P(f)进行2维离散傅里叶反变换

由此可以重构出一幅图像,用来表示原图像各像素的显著性,称为显著图(saliencymap)。
下面为基于谱残差法显著性检测的matlab代码
function [srmap] = sr(rgb, sigma)
%计算利用最基本普残差得到显著图,即不包含颜色亮度分量等特征
F = fft2(rgb2gray(rgb));%将彩色图像转为灰度图像(即亮度)后进行二维离散傅立叶变换
Af = abs(F);%对傅立叶变换结果取绝对值(即求变换后图像的幅度图像)
Pf = angle(F);%求变换后图像的相位谱图像
Lf = log(Af);%得到幅度值的Log谱
filt = fspecial('average', 3);%创建局部平均滤波算子[3,3]为默认尺寸
%circular'图像大小通过将图像看成是一个二维周期函数的一个周期来扩展
Rf = Lf - imfilter(Lf, filt, 'circular');% 幅度值的Log谱-局部平均滤波器进行平滑处理后的Log谱得到普残差
srmap = ifft2((exp(Rf+i*Pf)));%将相位谱和谱残差进行二维傅立叶反变换得到显著图
srmap = abs(srmap);%取上面计算图像的幅值部分即位显著图(saliency map)
srmap = srmap .^ 2;%将显著图矩阵中各个元素平方,即为进行二维卷积运算,利用了“复数和它的共轭复数的乘积是复数模的平方”这一结论
srmap = mat2gray(imfilter(srmap, fspecial('gaussian',[3 3], sigma)));%对处理后的显著图进行滤波(高斯低通滤波尺寸为[3,3],Sigma为滤波器的标准差),然后归一化
end
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 3280
3280

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









