







 本文讲述了作者从接手工程训练大赛的经历,分享了使用MM32F系列芯片进行小车控制算法和电路硬件设计的心得,强调性能选择的重要性,并给出了备赛耗材建议,特别提到了Arduino的局限性。
本文讲述了作者从接手工程训练大赛的经历,分享了使用MM32F系列芯片进行小车控制算法和电路硬件设计的心得,强调性能选择的重要性,并给出了备赛耗材建议,特别提到了Arduino的局限性。
前言
 https://www.bilibili.com/video/BV1Tv411u7A1?spm_id_from=333.999.0.0
https://www.bilibili.com/video/BV1Tv411u7A1?spm_id_from=333.999.0.0从2020年12月被同学拉去接盘一个工程训练大赛校赛的烂尾队伍工程开始入坑,到2021年10月24日在上海嘉定体育中心工程训练大赛全国总决赛(补赛)结束,断断续续持续了11个月。
当初在2020年最后一天到2021年第一天通宵写代码想获得省赛资格,后来意料之外的获得江苏省赛特等奖(第二名,确实离第一名南航的车有很大差距),之后准备国赛换了mcu,重新从0开始做车,陆陆续续做了大概十多天,任务逻辑上出了个bug,导致国赛初赛搬运颜色出错,丢了几乎丢了整个比赛一半的分数,不过还是很幸运的进入了社区赛。社区赛关小黑屋8小时,晚上又通宵写了一晚上的任务逻辑代码,第二天车摆烂意思意思抓了点放了点。截至2021/10/25虽然成绩还没出,不过保底银奖了也算满意。
比赛的东西还是很基础的,但往往把简单的东西发挥到极致就是很难得事了,因为主管这个比赛的单位是工程训练中心而不是学院,所以经费这块被拿捏死了,一直想买一些很贵的舵机没机会买,就用了一大堆辣鸡舵机在硬调。之前有学长说的话很有道理:控制就是把不好用的东西变好用,于此想把自己的竞赛经验和技术难点分享给大家,方案照抄的话可以很低成本(不到2k)的完成这个比赛。
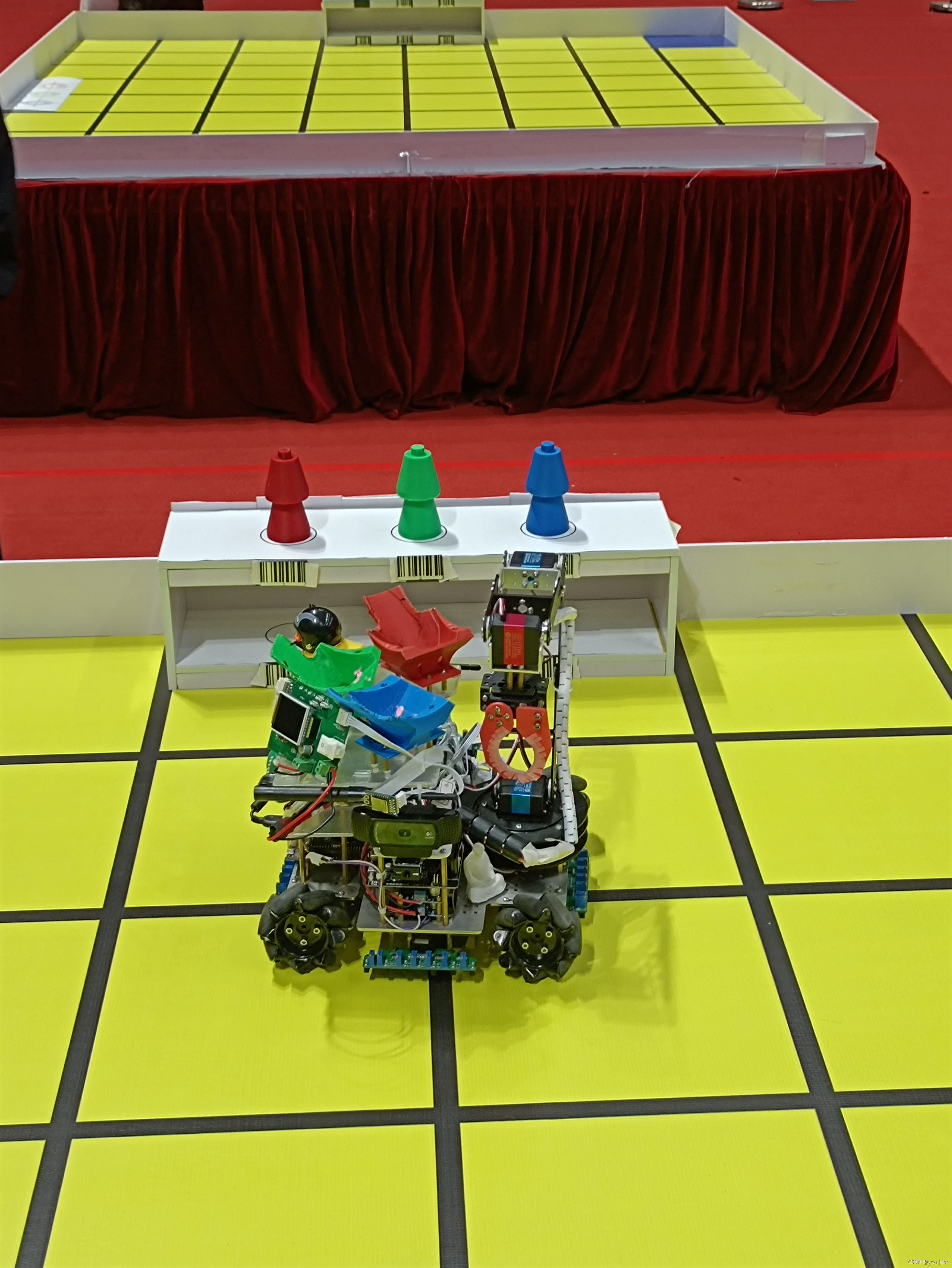
我主要负责的小车的底盘机械硬件设计,电路板硬件设计 ,控制软件编写。所以本文章仅写这三个部分,视觉部分和机械臂动作组调试是队友完成的,我在后面会一笔带过。
我会说些什么
由于我使用的芯片是mm32f3277g9p和mm32spin27ps,是参加2021年全国大学生智能车竞赛的芯片,跟大家用的最多的stm32还是差一些的,所以一些底层的外设(pwm、串口等)需要自行配置,我这里也不放这些代码了,我会重点讲一些小车控制算法和电路硬件设计的实现。
哦对了,关于备赛使用的耗材我也可以给个参考,避免大家被tb的js坑。
我省赛和国赛的车还是差很多的,省赛使用的方案是两张arduino mega2560板子做小车主控和一张openmv做颜色识别,国赛用的是一张mm32f3277g9p做小车主控、一张mm32spin27ps做外部显示、wifi接收等,视觉识别薅了一个高大上的Jetson Nano用usb摄像头处理。
在这里我要跟大家说我做这个比赛遇到的第一个坑:别用arduino做这个比赛,因为arduino mega2560是一款8位mcu,性能极其拉垮,虽然上手简单、简单能用,但是代码量上来后会对后续加功能产生极大的制约。我现在已经不想看省赛的代码了,一个.ino里有4千多行代码,已经让我很头疼了。建议大家在这种复杂度极高的比赛,一开始一定要使用一款性能够用的芯片!!!建议大家用stm32f103、stm32f407这类学习资料极其丰富的mcu(虽然在2021年贵的离谱。。)。


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









