










 本文深入探讨了连续波雷达的四种类型:单频、调频连续波、相位编码连续波和多频连续波雷达。通过对发射和接收信号波形的分析,阐述了各类雷达的测距测速原理,并通过仿真展示了信号处理过程和结果。内容涵盖波形特点、测距测速方法以及具体实现细节。
本文深入探讨了连续波雷达的四种类型:单频、调频连续波、相位编码连续波和多频连续波雷达。通过对发射和接收信号波形的分析,阐述了各类雷达的测距测速原理,并通过仿真展示了信号处理过程和结果。内容涵盖波形特点、测距测速方法以及具体实现细节。
系列文章目录
文章目录
目录
前言
上一篇文章主要从雷达波形的角度重新认识雷达,这篇文章及之后的几篇文章将结合仿真简单介绍具体的雷达波形。
一、连续波雷达信号
1.1 单频雷达信号
波形特点:发射未经调制的单频点的连续波信号。
发射信号波形:
接收信号波形:
其中
混频得到差频信号,即多普勒信号:
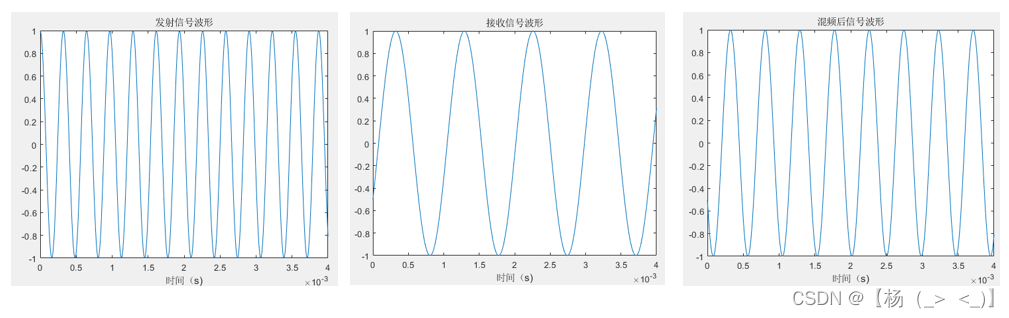
为了更好的显示目标运动对接收信号的影响,仿真参数设置为载频3.1KHz,采样率 100KHz,目标距离50e6m,速度1e8 m/s(参数在实际场景中几乎不出现,这里只是为了结果的更好展示进行的参数设置)。
收发信号以及混频后信号实部如下:
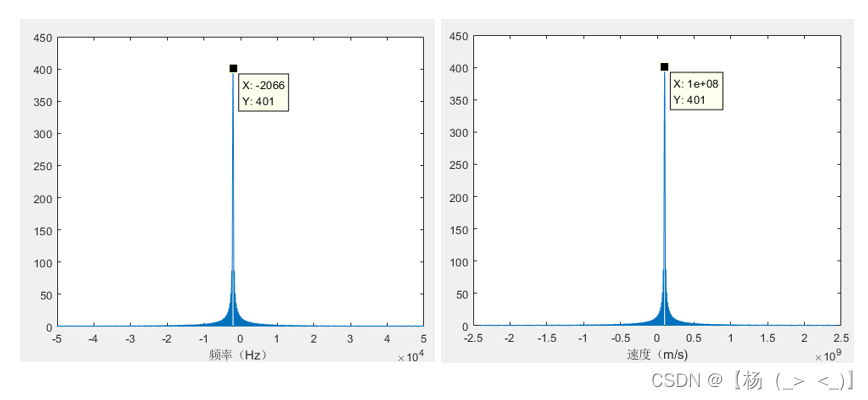
测速结果如下:
1.2 调频连续波雷达
包括非线性调频连续波雷达和线性调频连续波雷达,以线性调频率波雷达为例,波形特点:发射信号频率随时间周期性的线性变化。测距测速原理原理:根据收发信号的频率差进行测距,根据多普勒频率进行测速。
发射信号波形:
接收信号波形:
其中
混频得到差频信号,即多普勒信号:
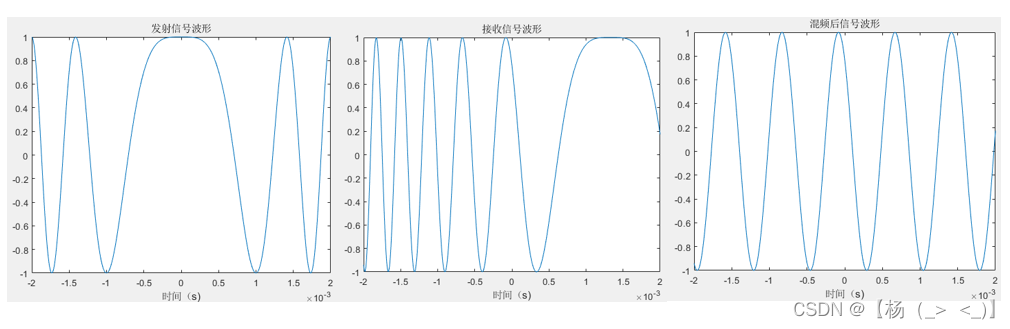
为了说明测距原理,速度设置为0,仿真参数设置为载频3 GHz,采样率 100KHz,目标距离200e6m,时长4ms,调频率1 MHz/s,收发信号以及混频后信号实部如下
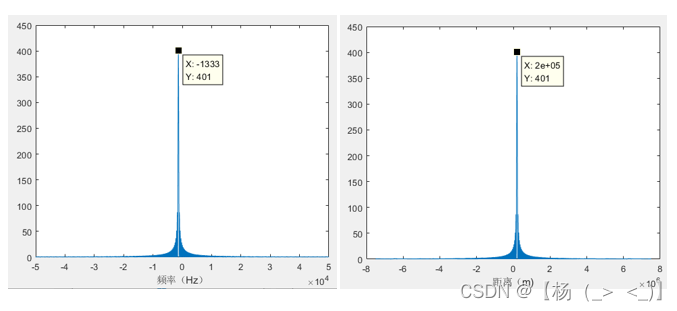
测距结果如下:
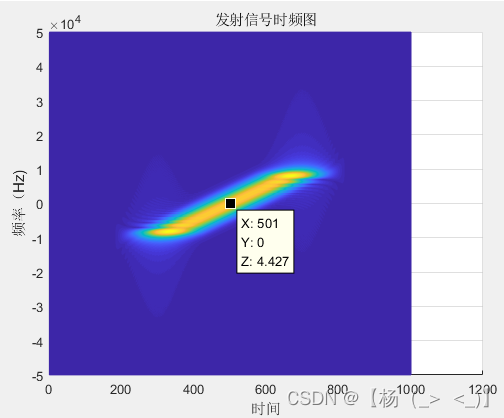
从混频后的表达式可以看出,距离和速度都会对差频产生影响。一种解决思路是,利用中心频点的变化(即多普勒频率)测速,再将速度的影响从调频连续波雷达中去除,设置调频率5 MHz/s,速度为1000 m/s,时频图如下,可以通过中心频点变化值估计多普勒频率,并由此得到速度估值。
另一种方法是利用信号的IQ两路进行估计,根据正频率与负频率的匹配的两个时间的和与差得到距离与速度的估计。
1.3 相位编码连续波雷达
波形特点:发射信号的相位由周期性变化的编码子脉冲序列进行调制。测距测速原理:根据收发信号的相位变化的起始时间之差测距,根据多普勒频率测速。
发射信号波形:
其中
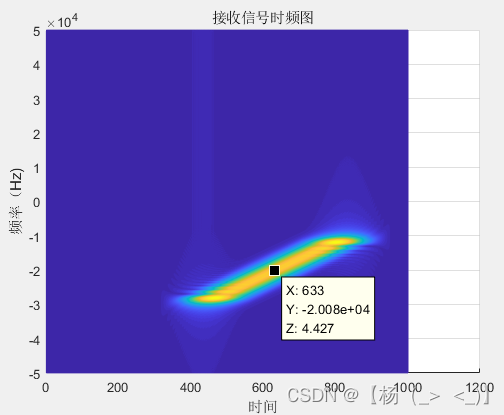
接收信号波形:
其中
发射信号相位变化起始位置
其中
接收信号相位变化起始位置
其中
由此,通过收发相位变化的时间差得到目标距离。
混频得到差频信号,即多普勒信号:
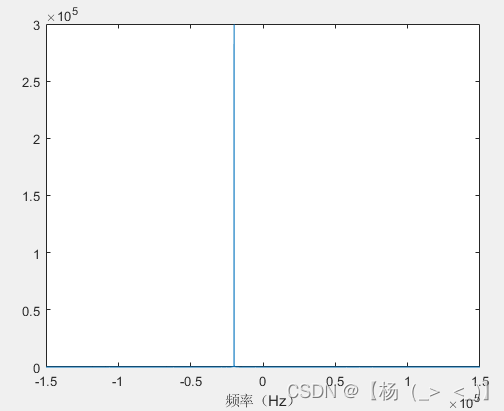
仿真参数设置为载频3 GHz,采样率 300KHz,目标距离50 km,速度1000 m/s,时长1 s,测距
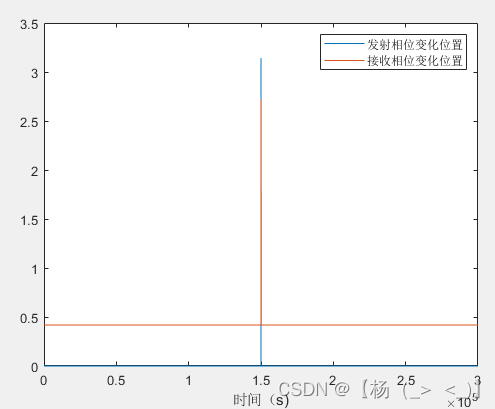
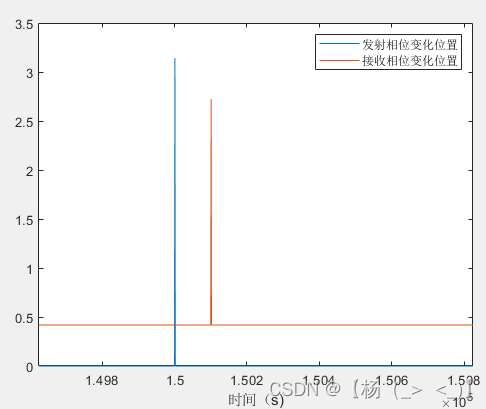
根据时延得到距离估计值为 50km
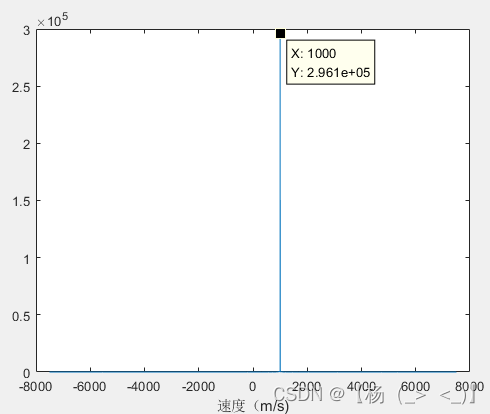
测速如下:
1.4 多频连续波雷达
波形特点:发射信号具有两个以上的载频。测距测速原理:根据不同频率的回波信号相位差进行测距,根据多普勒频率进行测速。以两频点为例:
发射信号波形:
接收信号波形:
其中
混频得到差频信号,即多普勒信号:
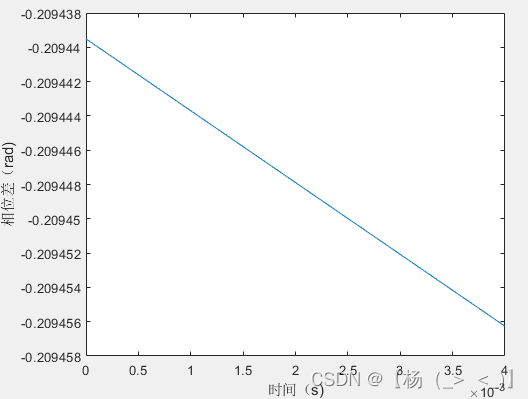
相位差分得到:
其中
相位差:
距离历程:
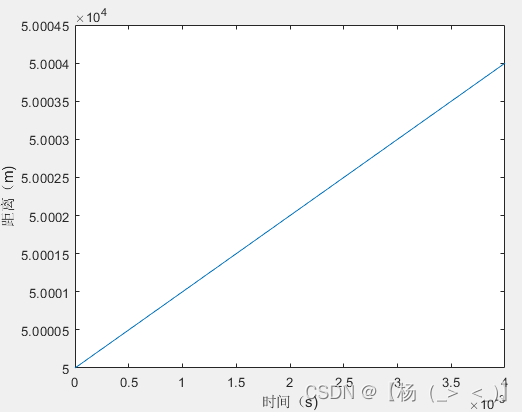
零时刻距离50km,速度1000m/s,与设置的值一致。
代码见:《雷达领域+波形设计+连续波雷达体制》
总结
本文对连续波雷达进行了简单的介绍。 转载请附链接【杨(_> <_)】的博客_CSDN博客-信号处理,SAR,代码实现领域博主



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











