









凸包convexHull、道格拉斯-普克算法Douglas-Peucker algorithm、approxPloyDP 函数
道格拉斯-普克算法(Douglas–Peucker algorithm),亦称为拉默-道格拉斯-普克算法(Ramer–Douglas–Peucker algorithm),这个算法最初由拉默(Urs Ramer)于1972年提出,1973年道格拉斯(David Douglas)和普克(Thomas Peucker)二人又独立于拉默提出了该算法。我们知道,一条曲线上包含着无数个点,但是计算机在存储曲线时只能存取有限个点,通常存储的点越多,那么对该曲线的描述也就越精确。当我们要对原本用N个点描述的曲线进行压缩表示时,即采用K(K<N)个点来描述曲线,为了尽可能保证原有曲线的形态不至有太大的改变,我们就需要一种算法,而道格拉斯-普克算法就是这样一种将曲线近似表示为一系列点,并减少点的数量的一种算法。它的优点是具有平移和旋转不变性,给定曲线与阈值后,抽样结果一定。
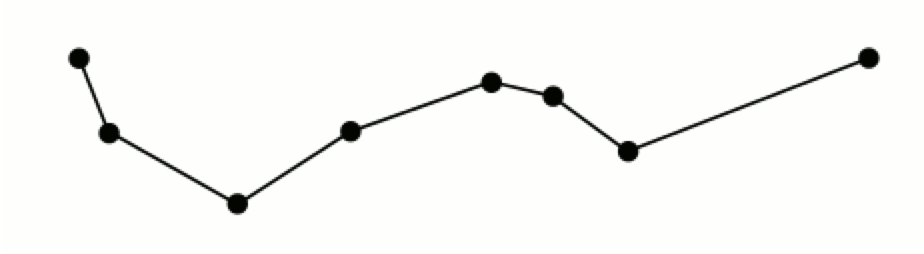
下面,我们通过一个例子来介绍一下该算法的执行步骤。假设当前我们有一条曲线,它由8各点来描述,如下图所示
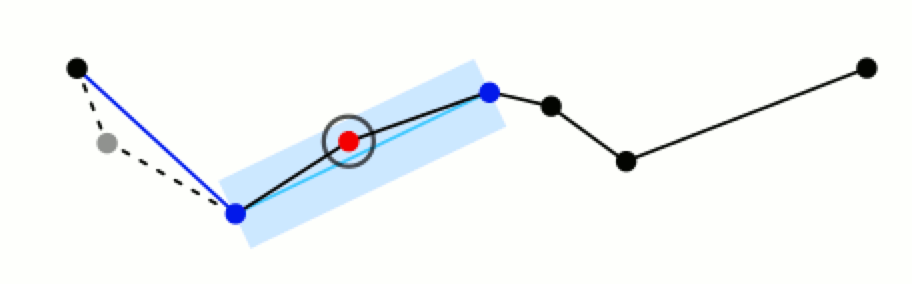
初始曲线是一系列有序的点集,我们需要设定一个距离(阈值)参数 ε > 0。最开始时,在曲线首尾两点A,B之间连接一条直线AB。算法自动将首尾两个点记下(也就是存入结果点集)。得到曲线上离该直线段(AB)距离最大的点C,计算其与AB的距离d,如下图所示
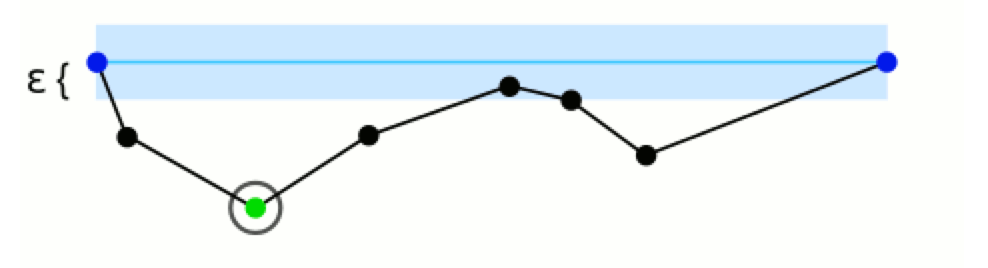
如果用直线段AB来作为原曲线的近似表示,那么点C显然是位于曲线上,离AB最远的点。现在比较距离 d 与预先给定的阈值 ε 的大小,如果小于 ε,则表明任何当前没有被记下的点都可以被丢弃了,因为用已经得到的直线段作为曲线的近似,不会比 ε 更早,即该段曲线处理完毕。
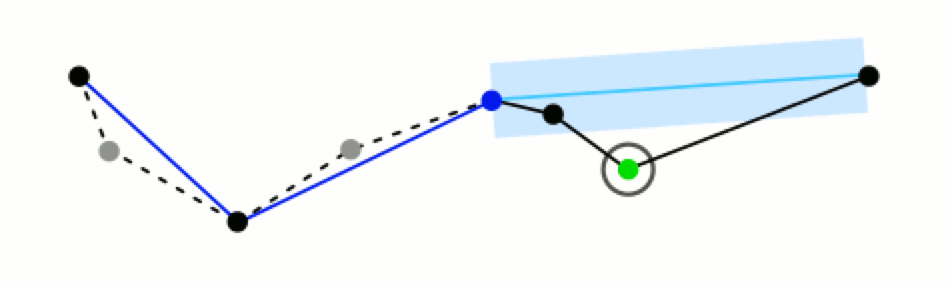
如果距离 d 大于阈值,则用C将曲线分为两段AC和BC,并将点C记下。
然后分别对已经得到两段曲线递归地进行上述处理。
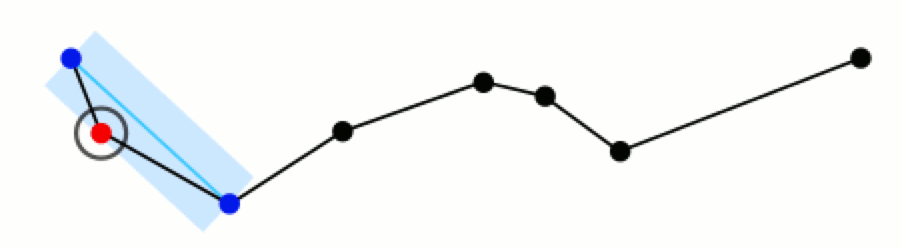
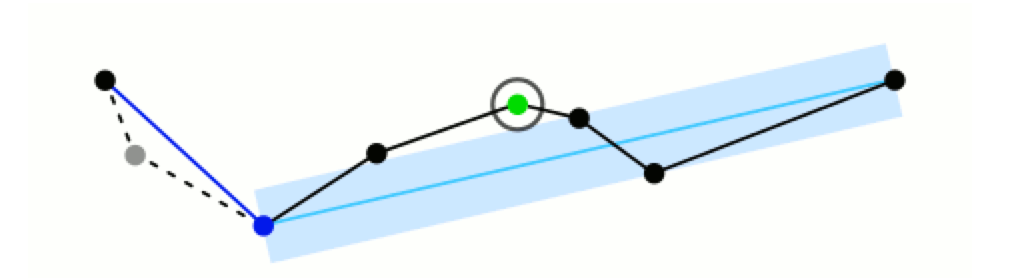
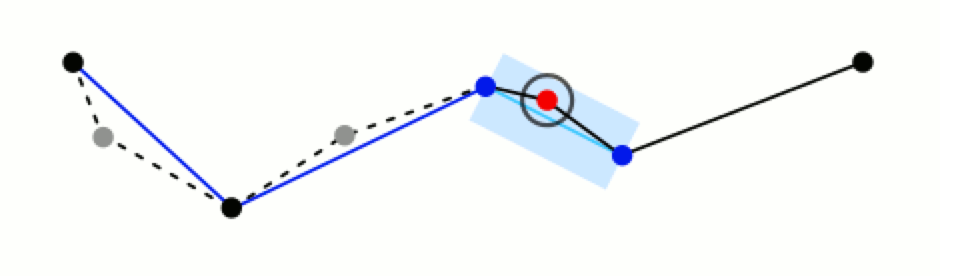
当所有曲线都处理完毕时,依次连接各个分割点形成的折线,即可以作为曲线的近似。就本例而言,接下来的处理步骤如下图所示:
↓
↓
↓

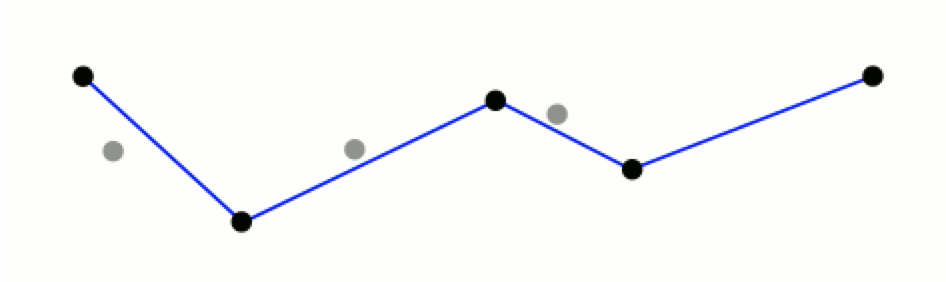
最终我们得到的(用更少的点表示的)近似曲线如下
参考:https://blog.csdn.net/baimafujinji/article/details/6475432
python 实现:
#-*- coding:utf-8 -*-
"""
道格拉斯算法的实现
程序需要安装shapely模块
"""
import math
from shapely import wkt,geometry
import matplotlib.pyplot as plt
class Point:
"""点类"""
x=0.0
y=0.0
index=0 #点在线上的索引
def __init__(self,x,y,index):
self.x=x
self.y=y
self.index=index
class Douglas:
"""道格拉斯算法类"""
points=[]
D=1 #容差
def readPoint(self):
"""生成点要素"""
g=wkt.loads("LINESTRING(1 4,2 3,4 2,6 6,7 7,8 6,9 5,10 10)")
coords=g.coords
for i in range(len(coords)):
self.points.append(Point(coords[i][0],coords[i][1],i))
def compress(self,p1,p2):
"""具体的抽稀算法"""
swichvalue=False
#一般式直线方程系数 A*x+B*y+C=0,利用点斜式,分母可以省略约区
#A=(p1.y-p2.y)/math.sqrt(math.pow(p1.y-p2.y,2)+math.pow(p1.x-p2.x,2))
A=(p1.y-p2.y)
#B=(p2.x-p1.x)/math.sqrt(math.pow(p1.y-p2.y,2)+math.pow(p1.x-p2.x,2))
B=(p2.x-p1.x)
#C=(p1.x*p2.y-p2.x*p1.y)/math.sqrt(math.pow(p1.y-p2.y,2)+math.pow(p1.x-p2.x,2))
C=(p1.x*p2.y-p2.x*p1.y)
m=self.points.index(p1)
n=self.points.index(p2)
distance=[]
middle=None
if(n==m+1):
return
#计算中间点到直线的距离
for i in range(m+1,n):
d=abs(A*self.points[i].x+B*self.points[i].y+C)/math.sqrt(math.pow(A,2)+math.pow(B,2))
distance.append(d)
dmax=max(distance)
if dmax>self.D:
swichvalue=True
else:
swichvalue=False
if(not swichvalue):
for i in range(m+1,n):
del self.points[i]
else:
for i in range(m+1,n):
if(abs(A*self.points[i].x+B*self.points[i].y+C)/math.sqrt(math.pow(A,2)+math.pow(B,2))==dmax):
middle=self.points[i]
self.compress(p1,middle)
self.compress(middle,p2)
def printPoint(self):
"""打印数据点"""
for p in self.points:
print "%d,%f,%f"%(p.index,p.x,p.y)
def main():
"""测试"""
#p=Point(20,20,1)
#print '%d,%d,%d'%(p.x,p.x,p.index)
d=Douglas()
d.readPoint()
#d.printPoint()
#结果图形的绘制,抽稀之前绘制
fig=plt.figure()
a1=fig.add_subplot(121)
dx=[]
dy=[]
for i in range(len(d.points)):
dx.append(d.points[i].x)
dy.append(d.points[i].y)
a1.plot(dx,dy,color='g',linestyle='-',marker='+')
d.compress(d.points[0],d.points[len(d.points)-1])
#抽稀之后绘制
dx1=[]
dy1=[]
a2=fig.add_subplot(122)
for p in d.points:
dx1.append(p.x)
dy1.append(p.y)
a2.plot(dx1,dy1,color='r',linestyle='-',marker='+')
#print "========================\n"
#d.printPoint()
plt.show()
if __name__=='__main__':
main()
opencv多边形拟合曲线approxPolyDP()函数
approxPolyDP()函数是opencv中对指定的点集进行多边形逼近的函数,其逼近的精度可通过参数设置。
对应的函数为:
void approxPolyDP(InputArray curve, OutputArray approxCurve, double epsilon, bool closed);
例如:approxPolyDP(contourMat, approxCurve, 10, true);//找出轮廓的多边形拟合曲线
第一个参数 InputArray curve:输入的点集
第二个参数OutputArray approxCurve:输出的点集,当前点集是能最小包容指定点集的。画出来即是一个多边形。
第三个参数double epsilon:指定的精度,也即是原始曲线与近似曲线之间的最大距离。
第四个参数bool closed:若为true,则说明近似曲线是闭合的;反之,若为false,则断开。
该函数采用是道格拉斯-普克算法(Douglas-Peucker)来实现。该算法也以Douglas-Peucker算法和迭代终点拟合算法为名。是将曲线近似表示为一系列点,并减少点的数量的一种算法。该算法的原始类型分别由乌尔斯·拉默(Urs Ramer)于1972年以及大卫·道格拉斯(David Douglas)和托马斯·普克(Thomas Peucker)于1973年提出,并在之后的数十年中由其他学者予以完善。
经典的Douglas-Peucker算法描述如下:
(1)在曲线首尾两点A,B之间连接一条直线AB,该直线为曲线的弦;
(2)得到曲线上离该直线段距离最大的点C,计算其与AB的距离d;
(3)比较该距离与预先给定的阈值threshold的大小,如果小于threshold,则该直线段作为曲线的近似,该段曲线处理完毕。
(4)如果距离大于阈值,则用C将曲线分为两段AC和BC,并分别对两段取信进行1~3的处理。
(5)当所有曲线都处理完毕时,依次连接各个分割点形成的折线,即可以作为曲线的近似。
凸包convexHull
作用:找到2D点集的凸包
cv2.convexHull(points[, clockwise[, returnPoints]]]) -> hull参数:
points - 2D点集 2D point set
clockwise - 布尔类型,默认false;若为true,输出的凸包则为顺时针方向;若为false,输出的凸包则为逆时针方向。注意:这里的坐标系是x轴方向指向右侧,y轴方向指向上方。
returnPoints - 布尔类型,默认true,在矩阵情况下,若为true,则返回凸包点集;若为false,则返回整数向量的索引
返回值:
hull - 输出的凸包,是整数向量的索引(an integer vector of indices)或点集向量(vector of points)
代码示例:
hull = cv2.convexHull(cnt)运行效果:

代码综合
import cv2
import numpy as np
img = cv2.imread('Mjolnir.jpg')
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray,127,255,cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(binary,cv2.RETR_EXTERNAL,cv2.CHAIN_APPROX_SIMPLE)
for cnt in contours:
# ----源轮廓-------
cv2.drawContours(img, [cnt], -1, (0, 255, 0), 2)
# 近似多边形
# epsilon 为近似度参数,该值需要轮廓的周长信息
# 多边形周长与源轮廓周长之比就是epsilon
epsilon = 0.01 * cv2.arcLength(cnt,True)
approx = cv2.approxPolyDP(cnt, epsilon, True)
cv2.drawContours(img, [approx], -1, (255, 255, 0), 2)
# 凸包
hull = cv2.convexHull(cnt)
cv2.drawContours(img, [hull], -1, (0, 0, 255), 2)
cv2.imshow("approx",img)
cv2.waitKey(0)
cv2.destroyAllWindows()运行效果

参考:https://my.oschina.net/u/4320155/blog/3657674















 8517
8517











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









