







 本文介绍了如何使用Landsat8影像数据,通过构建植被掩膜、水体掩膜和土壤掩膜,结合决策树策略提取南昌地区的不透水面信息。特别强调了针对单一不透水面指数不足的问题,通过融合多个地表覆盖类型相关的指数,提高了提取精度。文章详细阐述了各掩膜的制作过程,并展示了提取结果和分类精度评估。
本文介绍了如何使用Landsat8影像数据,通过构建植被掩膜、水体掩膜和土壤掩膜,结合决策树策略提取南昌地区的不透水面信息。特别强调了针对单一不透水面指数不足的问题,通过融合多个地表覆盖类型相关的指数,提高了提取精度。文章详细阐述了各掩膜的制作过程,并展示了提取结果和分类精度评估。
本文采用指数法提取研究区的不透水面信息,研究发现单一的不透水面指数并不适用于研究区不透水面信息的提取。因此在充分分析研究区地表覆盖类型的基础上,通过契合研究区的植被、水体、土壤的指数,提取透水面,并基于决策树思想一剔除透水面地物,反向提取不透水面。
获取的影像为Landsat8 Level 1产品,已经过系统几何校正。本次试验预处理包括:对影像进行辐射定标,以消除由于辐射误差引起的影像变形;将2景影像镶嵌,并结合南昌市的行政区划矢量图对影像裁剪,得到南昌地区30 m分辨率的影像图。
2不透水面提取模型构建
为克服单一不透水面指数获取不透水面精度不足的缺点,本文结合研究区地表覆盖类型,通过契合研究区的植被、水体、土壤指数,构建了高精度植被、水体、土壤掩膜,通过掩膜文件去除植被、水体、土壤这3种研究区主要透水面,从而获取研究区不透水面信息。
2.1
植被掩膜
植被掩膜采用建成区指数(BUAI)制作,该指数由文献基于归一化植被指数( NDVI)和归一化建筑指数( NDBI)的内涵而构建。其表达式为:
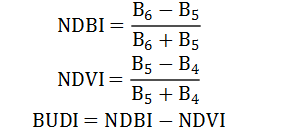
式中, B4、B5、B6分别代表Landsat 8影像红波段、近红外波段和短波红外波段。BUAI的值介于[-2,2],其值越大说明地表不透水程度越高,但试验发现该指数对不透水面和裸地的区分度较差。从指数本身的含义来看,BUAI的值越小说明地表透水比例越高,可运用该指数提取研究区植被信息。试验证明该指数可以较高的精度提取研究区的植被信息,特别是在城区细小植被的提取上有很好的效果。采用BUAI指数,阈值设置为-0.85,提取研究区植被信息,得到研究区植被分布二值图,并制作植被掩膜文件。
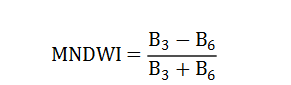
式中,B3、B6分别代表Landsat8影像中的绿波段和短波红外波段。利用MNDWI提取水体信息(阈值选取0.9)制作水体掩膜文件。
2.3土壤掩膜
在自然状态下,土壤的含水量、颗粒大小、有机质含量和土壤类型等都会影响反射波谱曲线。在大量采样的基础上,发现研究区的反射波谱曲线存在红波段反射率大于绿波段反射率的特点,因此采用波段间的差值运算提取研究区土壤信息。
BL= B4-B3 ( 3)
式中,B3和B4分别代表Landsat8影像中的绿波段和红波段; BL表示波段反射率差值,其阈值设定为-0.8 ,制作裸地掩膜文件。
2.4不透水面提取模型
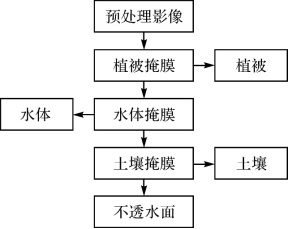
基于决策树思想,通过上述3种掩膜文件,从影像总体中剔除植被、水体、土壤这3种透水面信息,从而获取研究区不透水面信息。提取模型流程如图3所示。
3.1提取结果
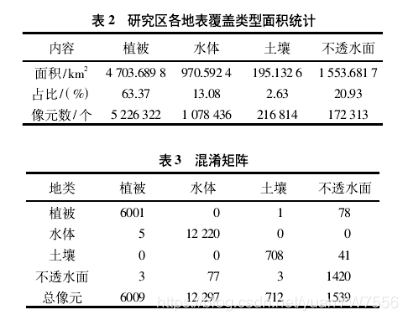
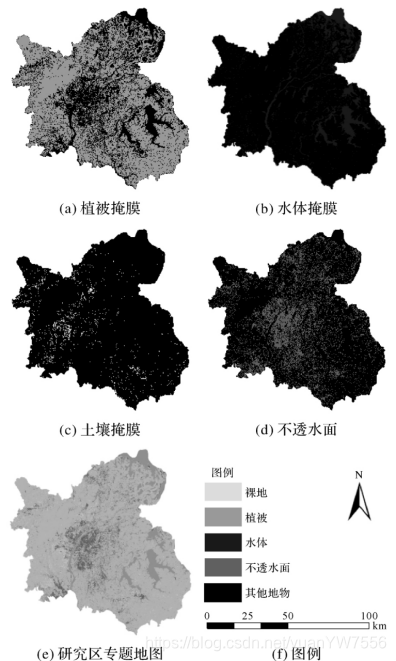
通过上述模型提取的南昌地区不透水面信息及过程中产生的掩膜文件如图4所示。通过图4可以看出,南昌市的不透水面主要分布在赣江沿岸的南昌市建成区(如图4(d)所示),研究区植被覆盖率.高,植被地类在研究区分布广泛(如图4(a)所示),水体则以鄱阳湖和赣江为主(如图4(b)所示) ,土壤主要包括分布在建成区边界的过渡性人工裸地及分布在山地间的自然裸地(如图4©所示)。通过计算各类地物面积及比重,得到研究区各地类信息统计(见表2)。研究区地表覆盖以植被为
主,其面积为4703.6898 km2 ,占比为63.37%,不透水面为研究区第2大地表覆盖类型,其面积为1 553.681 7 km2 ,占比为20.93%。水体和裸地分别以970.592 4、195.1326 km2的面积在研究区占有13.08%、2.63%的比重。
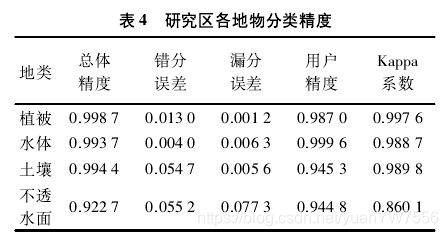
选取50个区域。对比统计获得提取结果的混淆矩阵并计算各地类分类的总体精度、错分误差、漏分误差、用户精度和Kappa系数,通过上述指标定量评定分类
精度。混淆矩阵和分类精度分别见表3、表4。
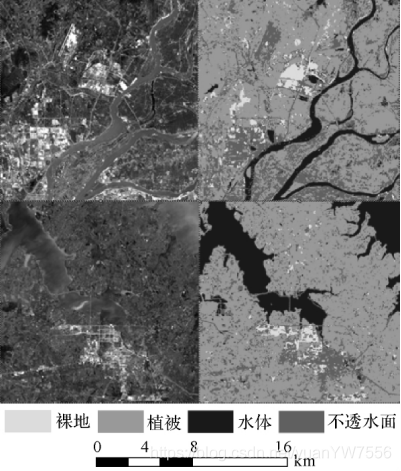
通过图5可以看出,不透水面与水体区分度最高,即使是细小的桥梁也能准确区分;与土壤的区分度次之,不透水面和土壤的边界存在少于错漏分现象;与植被的区分度最弱,某些细小道路被错分为植被。
参考文献:何佳君,刘向铜,涂梨平,等.南昌地区不透水面信息自动提取[J].测绘通报,2020(8): 1-4. I

















 7169
7169

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









