







调试记录,硬件配置表:
正运动三轴控制卡型号:ECI3320
合信伺服驱动器型号:A4N-B1525-M201,伺服电机型号:CTSD-M2D-B1525-M211
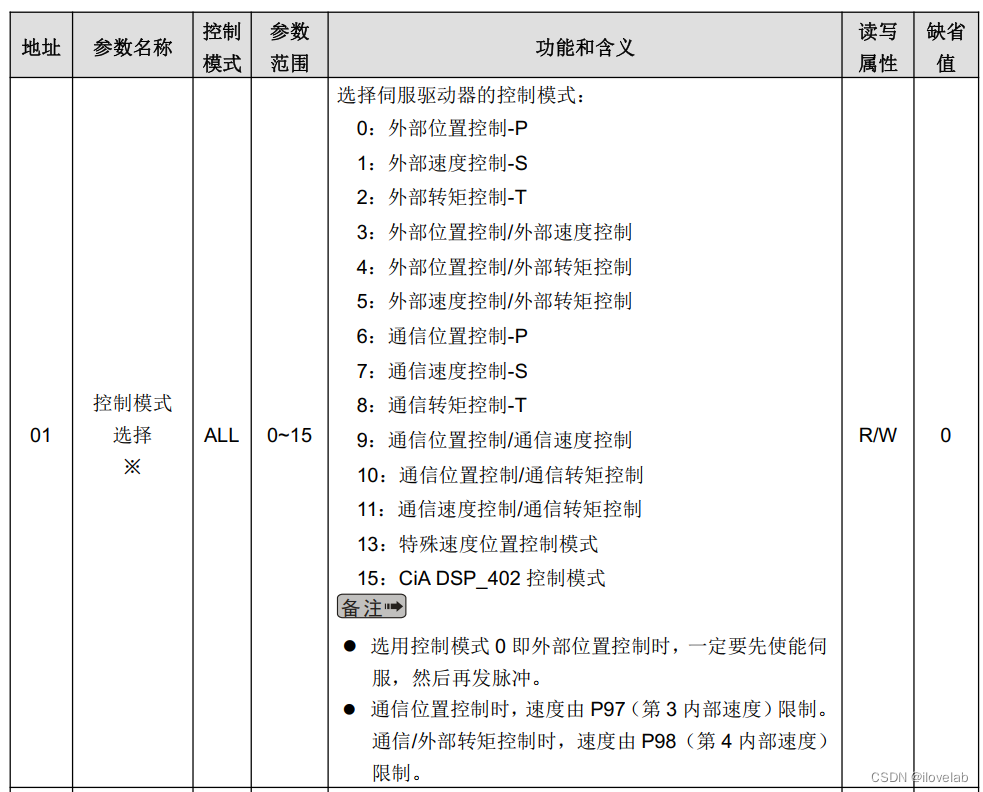
1、伺服驱动器侧设置
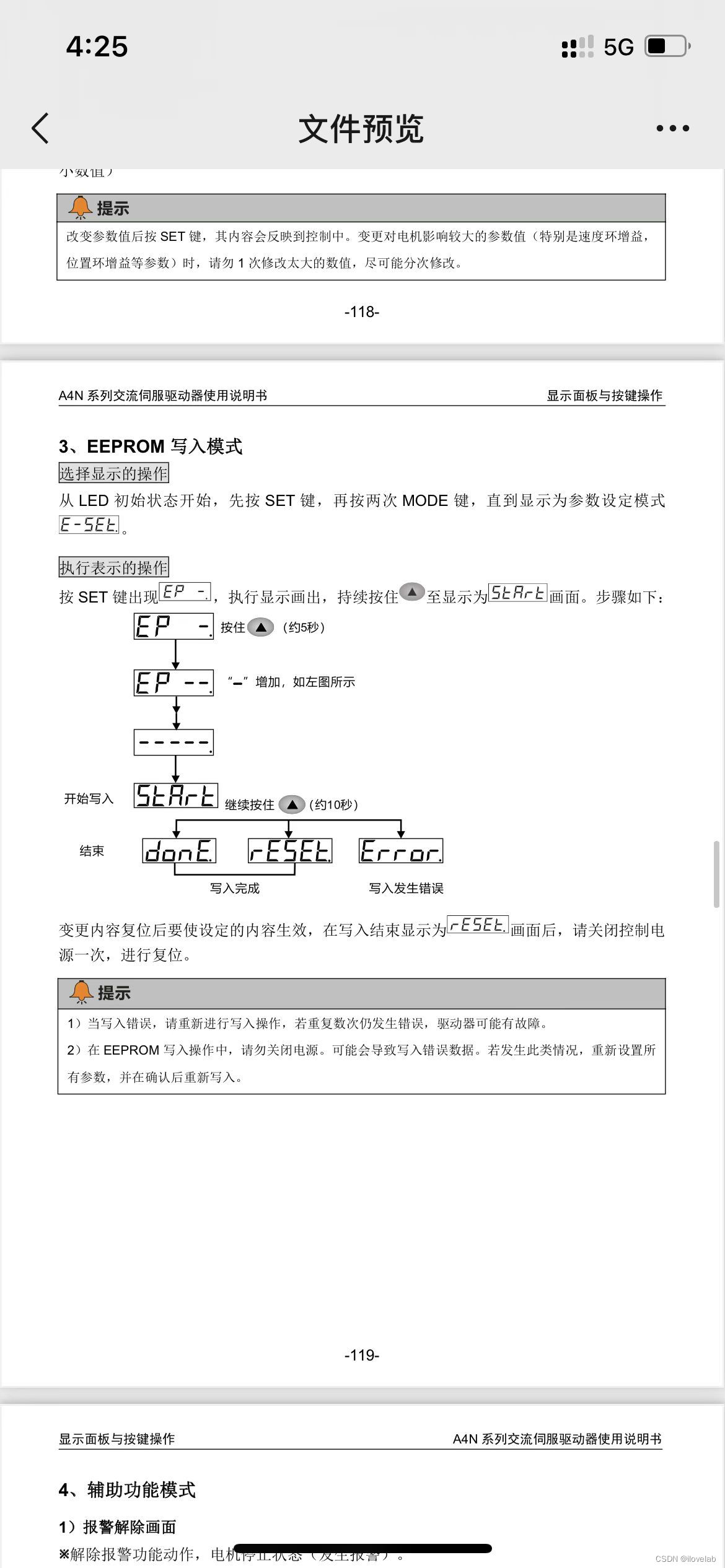
设置参数P01为15,然后保存,断电重启,断电重启保存,参考视频链接:
伺服面板操作——参数修改保存 (xiaoeknow.com)
2、操作正运动控制卡连接总线伺服
正运动控制卡使用ZDevelop V3.10.07连接后,先操作范例程序里的“正运动\光盘资料v1.6.3\8.PC函数\函数库2.1\window
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









