







二叉搜索树(B树)
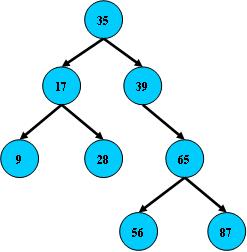
特性
1.所有非叶子结点至多拥有两个儿子(Left和Right);
2.所有结点存储一个关键字;
3.非叶子结点的左指针指向小于其关键字的子树,右指针指向大于其关键字的子树;
基本操作
- 搜索
struct TreeNode {
int val;
TreeNode * left;
TreeNode * right;
TreeNode(int val1): val(val1),left(nullptr),right(nullptr){}
};
TreeNode * search(TreeNode * root, int key) {
if(root == nullptr)
return nullptr;
if(root ->val == key)
return root;
if(root ->val > key)
return search(root ->left, key);
else
return search(root ->right, key);
}这个过程是根据B树自身性质决定的,搜索一个关键字,有以下几种情况:
- 当前的节点会是nullptr,说明没有合适的节点,返回空指针
- 找到,返回当前节点的指针
当前节点的值大于目标值,根据B树定义,目标值可能存在于当前节点的左子树中;对于当前节点的值小于目标值,根据B树定义,目标值可能存在于当前节点的右子树种
时间、空间复杂度分析
时间复杂度O(lgn),这个和树高有关,极端情况下为O(n),一般会采用BST,平衡二叉搜索树。空间复杂度O(1)
2.插入
void insert(TreeNode * root, int val) {
if(search(root,val) != nullptr)
return;
TreeNode * p = root;
Treenode * father = nullptr;
while(p != nullptr) {
father = p;
if(p ->val > val)
p = p ->left;
else
p = p ->right;
}
p = new TreeNode(val);
if(father ->val > val)
father ->left = p;
else
father ->right = p;
}首先,使用search,如果在B树中找到与之一致的节点,那么放弃插入。如没有找到,那么模拟查找的过程,找到需要插入的父节点,插入。
时间、空间复杂度分析
这里时间复杂度还是根据平均情况(BST)分析,O(lgn),空间复杂度O(1)
- 删除
TreeNode * delete(TreeNode * root, int val) {
if(search(root,val) == nullptr)
return;
if(root ->val == val) {
if(root ->left == nullptr && root ->right == nullptr) {
delete root;
return nullptr;
}
else if(root ->left == nullptr) {
TreeNode * p = root ->right;
delete root;
return p;
}
else if(root ->right == nullptr) {
TreeNode * p = root ->left;
delete root;
return p;
}
else {
TreeNode * q = root ->left;
TreeNode * qFather = nullptr;
while(q ->right != nullptr) {
qFather = q;
q = q ->right;
}
root ->val = q ->val;
if(qFather ->left == q) {
qFather ->left = nullptr;
delete q;
}
else {
qFather ->right = nullptr;
delete q;
}
}
}
TreeNode * p = root;
Treenode * father = nullptr;
while(p != nullptr) {
father = p;
if(p ->val > val)
p = p ->left;
else
p = p ->right;
}
if(p ->left == nullptr && p ->right == nullptr) {
if(father ->val > val)
father ->left = nullptr;
else
father ->right = nullptr;
delete p;
}
else if(p ->left == nullptr) {
if(father ->val > val)
father ->left = p ->right;
else
father ->right = p ->right;
delete p;
}
else if(p ->right == nullptr) {
if(father ->val > val)
father ->left = p ->left;
else
father ->right = p ->left;
delete p;
}
else {
TreeNode * q = p ->left;
TreeNode * qFather = p;
while(q ->right != nullptr) {
qFather = q;
q = q ->right;
}
p ->val = q->val;
delete q;
if(p == qFather)
p ->left = nullptr;
else
qFather ->right = nullptr;
}
return root;
}首先使用search,假设当前节点不在B树内,返回。在B树内,会分成两种情况:
删除的是根节点,分成三种情况:
- 左右子树均为空,返回空指针
- 左右子树有一个不为空,返回非空的子树
- 左右子树均不为空,这种比较麻烦一点,需要找到需要删除节点的前驱或者后继节点,我在代码里使用的是前驱,用前驱节点代替要删除节点,删除前驱节点原位置那个点
删除的不是根节点
找到要删除的节点的父节点,又分成三种情况:- 要删除节点左右子树均为空,那么直接删除即可
- 要删除节点左右子树只有一个不为空,直接用非空子树的根代替要删除的节点即可
- 要删除的节点左右子树均不为空,这种比较麻烦一点,需要找到需要删除节点的前驱或者后继节点,我在代码里使用的是前驱,用前驱节点代替要删除节点,删除前驱节点原位置那个点
注意:记得delete不用的空间
时间、空间复杂度分析
时间复杂度O(lgn),同样也是与树高有关,空间复杂度O(1)
后续会持续更新hash、B-,B+树的内容,如果发现文章内有错误,还望各位指正,谢谢。

















 567
567

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









