







一、超声播壁障小车工作原理
核心部件:
控制器、电机(马达)、齿轮、超声波传感
器(距离传感器)。
工作原理的过程:
1.超声波壁障小车在行走的过程中,遇到障碍物后会进行判断危险距离,如果在危险距离之内会后退;如果发现前方有障碍物会减速前进,并在到达危险距离之内后就避开障碍物;如果发现前方没有障碍物,便会保持全速直行;
2.超声波机器人只要重复以上指令过程就可以一直运动下去而不会碰到障碍物。
认识与运用超声波传感器
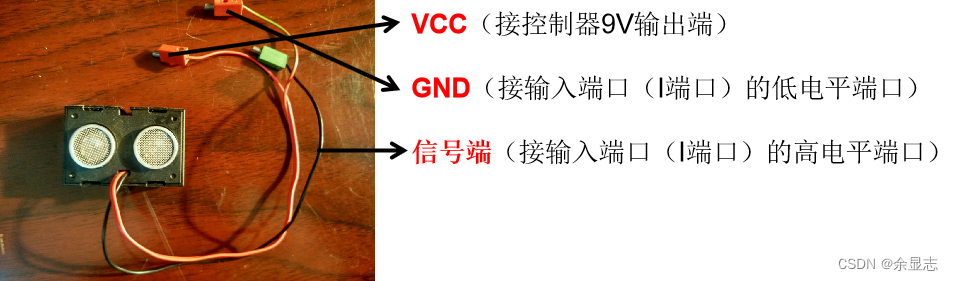
超声波传感器:
1.上图有两个形如“蜂鸣器”的圆头状结构,一个是超声波发射头,另一个是超声波接收头;
2.超声波传感器就可以通过超声波的发射与接收来实时测量前方障碍物的距离。
二、Analog Branch模拟变量判断模块
模拟变量判断模块:
1.许多慧鱼模型都用到了距离传感器,尤其是在许多慧鱼开发项目中需要测量距离的情况下,
 采用慧鱼套装积木、软硬件设计制作的超声波避障机器人案例,仅供参考和学习之用。
采用慧鱼套装积木、软硬件设计制作的超声波避障机器人案例,仅供参考和学习之用。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









