






1.录入人脸
1.1源码
import sensor, image, pyb
RED_LED_PIN = 1
BLUE_LED_PIN = 3
sensor.reset() # Initialize the camera sensor.
sensor.set_pixformat(sensor.GRAYSCALE) # or sensor.GRAYSCALE
sensor.set_framesize(sensor.B128X128) # or sensor.QQVGA (or others)
sensor.set_windowing((92,112))
sensor.skip_frames(10) # Let new settings take affect.
sensor.skip_frames(time = 2000)
num = 4 #设置被拍摄者序号,第一个人的图片保存到s1文件夹,第二个人的图片保存到s2文件夹,以此类推。每次更换拍摄者时,修改num值。
n = 20 #设置每个人拍摄图片数量。
#连续拍摄n张照片,每间隔3s拍摄一次。
while(n):
#红灯亮
pyb.LED(RED_LED_PIN).on()
sensor.skip_frames(time = 3000) # Give the user time to get ready.等待3s,准备一下表情。
#红灯灭,蓝灯亮
pyb.LED(RED_LED_PIN).off()
pyb.LED(BLUE_LED_PIN).on()
#保存截取到的图片到SD卡
print(n)
sensor.snapshot().save("singtown/s%s/%s.pgm" % (num, n) ) # or "example.bmp" (or others)
n -= 1
pyb.LED(BLUE_LED_PIN).off()
print("Done! Reset the camera to see the saved image.")
1.2注意事项
num = 4 #设置被拍摄者序号,第一个人的图片保存到s1文件夹,第二个人的图片保存到s2文件夹,以此类推。每次更换拍摄者时,修改num值。 n = 20 #设置每个人拍摄图片数量。num的值表示你准备录入的人员数量,比如要录入10个人,就将num赋值为10。
n代表你每个人脸的拍摄次数,稍微大一些,检测准确率会高一点。
2.检测人脸
2.1源码
import sensor, time, image, pyb
sensor.reset() # Initialize the camera sensor.
sensor.set_pixformat(sensor.GRAYSCALE) # or sensor.GRAYSCALE
sensor.set_framesize(sensor.B128X128) # or sensor.QQVGA (or others)
sensor.set_windowing((92,112))
sensor.skip_frames(10) # Let new settings take affect.
sensor.skip_frames(time = 5000) #等待5s
# 设置串口
uart = pyb.UART(1, 9600) # 使用 UART1 和 9600 波特率
#SUB = "s1"
NUM_SUBJECTS = 2 #图像库中不同人数,一共6人
NUM_SUBJECTS_IMGS = 20 #每人有20张样本图片
# 拍摄当前人脸。
img = sensor.snapshot()
#img = image.Image("singtown/%s/1.pgm"%(SUB))
d0 = img.find_lbp((0, 0, img.width(), img.height()))
#d0为当前人脸的lbp特征
img = None
pmin = 999999
num=0
def min(pmin, a, s):
global num
if a<pmin:
pmin=a
num=s
return pmin
# 初始化舵机
servo = pyb.Servo(1) # 选择对应的舵机号
for s in range(1, NUM_SUBJECTS+1):
dist = 0
for i in range(2, NUM_SUBJECTS_IMGS+1):
img = image.Image("singtown/s%d/%d.pgm"%(s, i))
d1 = img.find_lbp((0, 0, img.width(), img.height()))
#d1为第s文件夹中的第i张图片的lbp特征
dist += image.match_descriptor(d0, d1)#计算d0 d1即样本图像与被检测人脸的特征差异度。
print("Average dist for subject %d: %d"%(s, dist/NUM_SUBJECTS_IMGS))
pmin = min(pmin, dist/NUM_SUBJECTS_IMGS, s)#特征差异度越小,被检测人脸与此样本更相似更匹配。
print(pmin)
print(num) # num为当前最匹配的人的编号。
if num == 2:
print("识别成功,打开舵机")
uart.write('2') # 识别到编号为2的人脸,发送命令"2"
print("识别成功,发送命令: 2")
servo.angle(100) # 控制舵机旋转到100度
time.sleep(3) # 等待3秒钟
servo.angle(0) # 将舵机归位到0度
else:
print("识别失败!!!") 2.2注意事项
控制舵机 采用串口通信,在OpenMV端写好串口发送逻辑代码,然后在arduino端实现命令解析与控制,进而实现完整人脸识别控制小项目。
print("识别成功,打开舵机") uart.write('2') # 识别到编号为2的人脸,发送命令"2"此处的命令可以自定义修改!
3.Arduino端控制代码

4.模块展示

5.效果展示

简单测试录入的人脸,识别成功,终端打印调试信息!
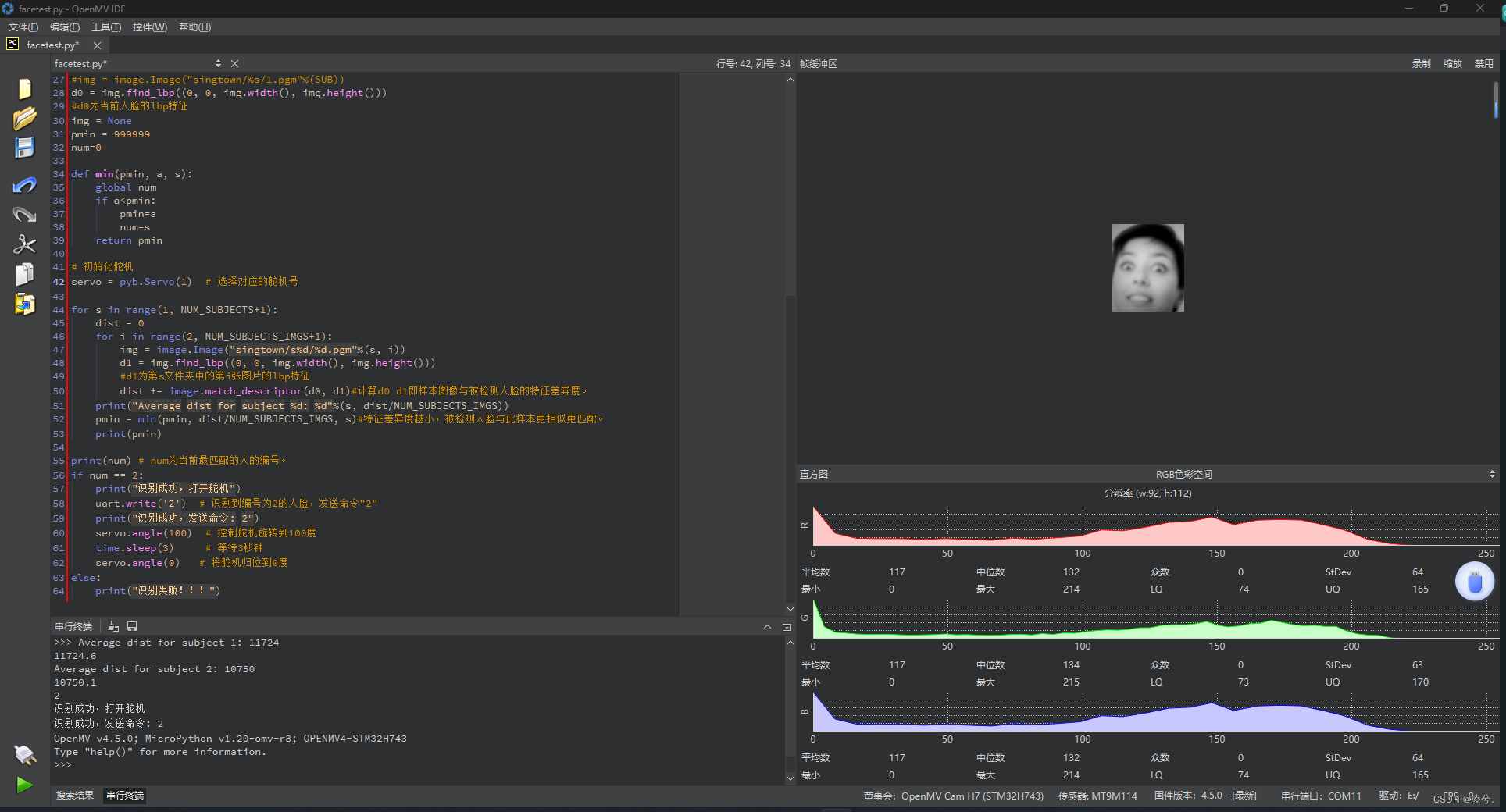
最终识别成功后,终端打印人脸比对成功或者失败的信息,同时通过串口发送命令给Arduino,Arduino处理并且控制舵机!















 720
720











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











