// contourStudy.cpp : 定义控制台应用程序的入口点。
//本文所提取的轮廓具有的特征: 只有一个无孔洞的内连通
#include "stdafx.h"
#include <opencv2/opencv.hpp>
#include <iostream>
#include <stack>
using namespace std;
#include <cv.h>
#include <highgui.h>
//计算轮廓深度
int GetLayerCnt(CvSeq *seq)
{
int count = 0;
while (seq->v_next)
{
count++;
seq = seq->v_next;
}
return count;
}
//获取只有一个内连通的轮廓
void GetAllContourByLimit(CvSeq *contour, vector<CvSeq *> &vecSeq)
{
int count = 0, count2 = 0;
CvSeq *contourNoLevel = 0, *contourSameLevel = 0;
stack<CvSeq *> data;
CvSeq *node = 0, *tmpContour = 0;
data.push(contour);
while (!data.empty())
{
node = data.top();
data.pop();
tmpContour = node->h_next;
//brother
if (tmpContour)
{
data.push(tmpContour);
}
//child
count = GetLayerCnt(node);
if (count >= 2)// 若要获取 深度为n 的内轮廓,则 count >= n+1 .
{
contourNoLevel = node->v_next->v_next;// 此处参照count的值
if (!contourNoLevel->v_next && !contourNoLevel->h_next)
{
vecSeq.push_back(node);
}
if (contourNoLevel->h_next || contourNoLevel->v_next)
{
data.push(contourNoLevel);
}
}
else if (count == 1)
{
tmpContour = node->v_next->h_next;
if (tmpContour)
{
data.push(tmpContour);
}
}
}
}
//抓取轮廓中心
void GetContourCenter(CvSeq *contour, CvPoint &p)
{
//重心法抓中心点
int contourlength = contour->total;
CvPoint *pt = 0;
double avg_px = 0, avg_py = 0;
for (int i = 0; i < contourlength; i++)
{
pt = CV_GET_SEQ_ELEM(CvPoint, contour, i);
avg_px += pt->x;
avg_py += pt->y;
}
p.x = avg_px / contourlength;
p.y = avg_py / contourlength;
}
//主函数
int _tmain(int argc, _TCHAR* argv[])
{
IplImage* src;
// the first command line parameter must be file name of binary (black-n-white) image
if ((src = cvLoadImage("7.bmp", 0)) != NULL)
{
IplImage* dst = cvCreateImage(cvGetSize(src), 8, 3);
CvMemStorage* storage = cvCreateMemStorage(0);
CvSeq* contour = 0, *contourNoLevel = 0, *contourSameLevel = 0, *outpput = 0;
cvThreshold(src, src, 1, 255, CV_THRESH_OTSU);
cvNot(src, src);
cvFindContours(src, storage, &contour, sizeof(CvContour), 3, CV_CHAIN_APPROX_NONE);
cvZero(dst);
vector<CvSeq *> vecSeq;
vecSeq.clear();
//获取所有只有一个内连通的轮廓
GetAllContourByLimit(contour, vecSeq);
//显示
CvPoint pt;
for (int i = 0; i<vecSeq.size(); i++)
{
if (1)//此处可以添加限制条件
{
GetContourCenter(vecSeq[i]->v_next->next, pt);
cvCircle(dst, pt, 2, cvScalar(0, 255, 0), 1, 8, 0);
cvDrawContours(dst, vecSeq[i], CV_RGB(255, 0, 0), CV_RGB(0, 0, 0), -1, 2);
}
}
cvNamedWindow("Result");
cvShowImage("Result", dst);
cvWaitKey(0);
}
system("pause");
return 0;
}
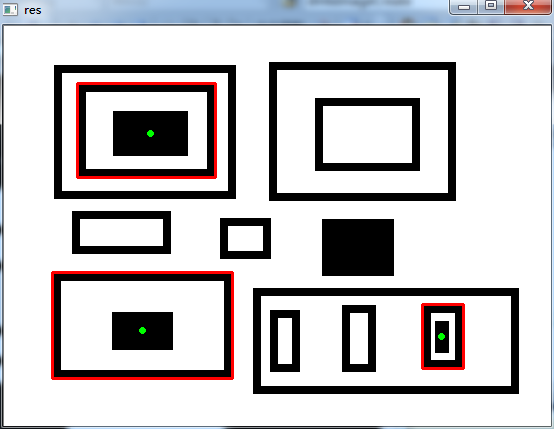
//效果图

























 5455
5455

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









