







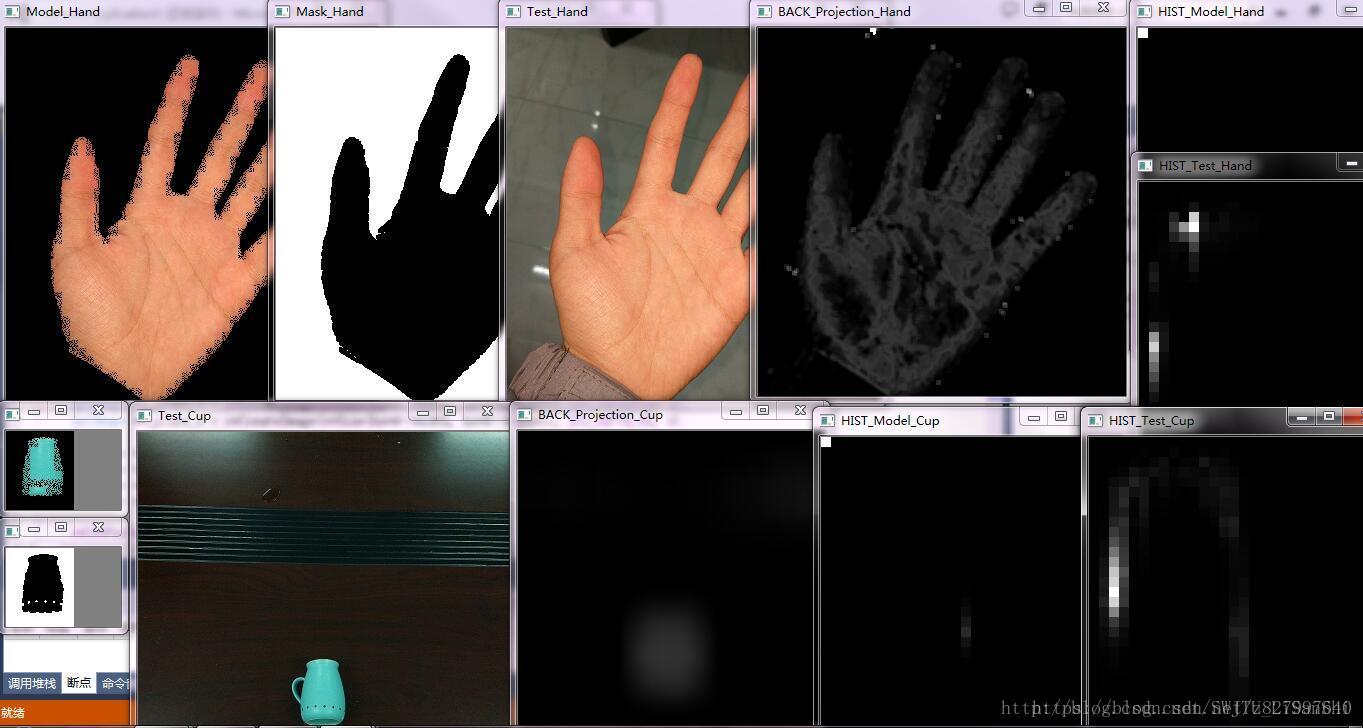
基于块的反向投影
根据输入的图像计算色相饱和度(hue-saturation)直方图,以网格形式显示,利用颜色模板直方图进行基于块的反向投影,在测试图像中找出该颜色模板直方图对应的区域,程序中,对于手的检测cvCalcArrBackProjectPatch()做区域检测器,对于杯子的检测cvCalcArrBackProjectPatch()做目标检测器,对应具体代码如下:
#include <cv.h>
#include <highgui.h>
#include <stdlib.h>
#include <stdio.h>
#include <math.h>
using namespace std;
int main(int argc, char* argv[])
{
//源图像 HSV格式图像
IplImage* Ihand_model, *Ihand_test, *Ihand_mask, *hsv1, *hsv2, *hsv3, *hsv4, *Icup_model, *Icup_test, *Icup_mask;
//未处理的肤色模板图像
if (!(Ihand_model = cvLoadImage("D:\\Template\\OpenCV\\Template49_hue-saturation_BackProjection_Patch\\Debug\\hand1.jpg")))
return -1;
//寻找手掌反向投影的测试图像
if (!(Ihand_test = cvLoadImage("D:\\Template\\OpenCV\\Template49_hue-saturation_BackProjection_Patch\\Debug\\hand3.jpg")))
return -2;
//用于处理肤色模板图像的掩码,此处调入图像掩码应为单通道
if (!(Ihand_mask = cvLoadImage("D:\\Template\\OpenCV\\Template49_hue-saturation_BackProjection_Patch\\Debug\\Imask.jpg",
CV_LOAD_IMAGE_GRAYSCALE)))
return -3;
//未处理的杯子颜色模板图像
if (!(Icup_model = cvLoadImage("D:\\Template\\OpenCV\\Template49_hue-saturation_BackProjection_Patch\\Debug\\cup2.jpg")))
return -4;
//寻找杯子反向投影的测试图像
if (!(Icup_test = cvLoadImage("D:\\Template\\OpenCV\\Template49_hue-saturation_BackProjection_Patch\\Debug\\cup1.jpg")))
return -5;
//用于处理杯子颜色模板图像的掩码 可获取杯子反向投影块大小
if (!(Icup_mask = cvLoadImage("D:\\Template\\OpenCV\\Template49_hue-saturation_BackProjection_Patch\\Debug\\cup3.jpg",
CV_LOAD_IMAGE_GRAYSCALE)))
return -6;
int hand_patch_width = 5; //手掌反向投影块宽度
int hand_patch_height = 5; //手掌反向投影块高度
int cup_patch_width = Icup_model->width; //杯子反向投影块宽度
int cup_patch_height = Icup_model->height; //杯子反向投影块高度
cvXorS(Ihand_mask, cvScalar(255), Ihand_mask); //掩码图像按位异或,求反,以手掌以外区域作为掩码
cvXorS(Icup_mask, cvScalar(255), Icup_mask); //掩码图像按位异或,求反,以杯子以外区域作为掩码
cvSet(Ihand_model, cvScalarAll(0), Ihand_mask); //将手掌以外区域变黑,生成肤色模板图像
cvSet(Icup_model, cvScalarAll(0), Icup_mask); //将手掌以外区域变黑,生成肤色模板图像
hsv1 = cvCreateImage(cvGetSize(Ihand_model), Ihand_model->depth, Ihand_model->nChannels); //HSV
hsv2 = cvCreateImage(cvGetSize(Ihand_test), Ihand_test->depth, Ihand_test->nChannels); //HSV
hsv3 = cvCreateImage(cvGetSize(Icup_model), Icup_model->depth, Icup_model->nChannels); //HSV
hsv4 = cvCreateImage(cvGetSize(Icup_test), Icup_test->depth, Icup_test->nChannels); //HSV
cvCvtColor(Ihand_model, hsv1, CV_BGR2HSV); //源图像->HSV格式图像
cvCvtColor(Ihand_test, hsv2, CV_BGR2HSV); //源图像->HSV格式图像
cvCvtColor(Icup_model, hsv3, CV_BGR2HSV); //源图像->HSV格式图像
cvCvtColor(Icup_test, hsv4, CV_BGR2HSV); //源图像->HSV格式图像
//反向投影图像 大小:测试图像-块的大小 浮点型数组
IplImage *Iback_projection_patch_hand = cvCreateImage(
cvSize(Ihand_test->width - hand_patch_width + 1, Ihand_test->height - hand_patch_height + 1),
IPL_DEPTH_32F, 1);
IplImage *Iback_projection_patch_cup = cvCreateImage(
cvSize(Icup_test->width - cup_patch_width + 1, Icup_test->height - cup_patch_height + 1),
IPL_DEPTH_32F, 1);
//色调(hue) 饱和度(saturation) 明度(value) 创建三通道图像
IplImage *h_plane_1 = cvCreateImage(cvSize(hsv1->width, hsv1->height), IPL_DEPTH_8U, 1);
IplImage *s_plane_1 = cvCreateImage(cvSize(hsv1->width, hsv1->height), IPL_DEPTH_8U, 1);
IplImage *v_plane_1 = cvCreateImage(cvSize(hsv1->width, hsv1->height), IPL_DEPTH_8U, 1);
IplImage *h_plane_2 = cvCreateImage(cvSize(hsv2->width, hsv2->height), IPL_DEPTH_8U, 1);
IplImage *s_plane_2 = cvCreateImage(cvSize(hsv2->width, hsv2->height), IPL_DEPTH_8U, 1);
IplImage *v_plane_2 = cvCreateImage(cvSize(hsv2->width, hsv2->height), IPL_DEPTH_8U, 1);
IplImage *h_plane_3 = cvCreateImage(cvSize(hsv3->width, hsv3->height), IPL_DEPTH_8U, 1);
IplImage *s_plane_3 = cvCreateImage(cvSize(hsv3->width, hsv3->height), IPL_DEPTH_8U, 1);
IplImage *v_plane_3 = cvCreateImage(cvSize(hsv3->width, hsv3->height), IPL_DEPTH_8U, 1);
IplImage *h_plane_4 = cvCreateImage(cvSize(hsv4->width, hsv4->height), IPL_DEPTH_8U, 1);
IplImage *s_plane_4 = cvCreateImage(cvSize(hsv4->width, hsv4->height), IPL_DEPTH_8U, 1);
IplImage *v_plane_4 = cvCreateImage(cvSize(hsv4->width, hsv4->height), IPL_DEPTH_8U, 1);
IplImage *planes1[] = { h_plane_1, s_plane_1 }; //色相饱和度数组
IplImage *planes2[] = { h_plane_2, s_plane_2 }; //色相饱和度数组
IplImage *planes3[] = { h_plane_3, s_plane_3 }; //色相饱和度数组
IplImage *planes4[] = { h_plane_4, s_plane_4 }; //色相饱和度数组
cvCvtPixToPlane(hsv1, h_plane_1, s_plane_1, v_plane_1, NULL); //图像分割
cvCvtPixToPlane(hsv2, h_plane_2, s_plane_2, v_plane_2, NULL); //图像分割
cvCvtPixToPlane(hsv3, h_plane_3, s_plane_3, v_plane_3, NULL);
cvCvtPixToPlane(hsv4, h_plane_4, s_plane_4, v_plane_4, NULL);
//cvSplit(hsv4, h_plane_4, s_plane_4, v_plane_4, NULL); //两函数效果相似
int h_bins = 30, s_bins = 32; //h维bins的个数,s维bins的个数
//建立模板和测试直方图
CvHistogram *hist_model_hand, *hist_test_hand, *hist_model_cup, *hist_test_cup;
int hist_size[] = { h_bins, s_bins }; //对应维数包含bins个数的数组
float h_ranges[] = { 0, 180 }; //H通道划分范围 饱和度0-180
float s_ranges[] = { 0, 255 }; //S通道划分范围
float* ranges[] = { h_ranges, s_ranges }; //划分范围数对, ****均匀bin,range只要最大最小边界
//创建直方图 (维数,对应维数bins个数,密集矩阵方式存储,划分范围数对,均匀直方图)
hist_model_hand = cvCreateHist(2, hist_size, CV_HIST_ARRAY, ranges, 1);
hist_test_hand = cvCreateHist(2, hist_size, CV_HIST_ARRAY, ranges, 1);
hist_model_cup= cvCreateHist(2, hist_size, CV_HIST_ARRAY, ranges, 1);
hist_test_cup = cvCreateHist(2, hist_size, CV_HIST_ARRAY, ranges, 1);
//计算直方图
cvCalcHist(planes1, hist_model_hand, 0, 0); //计算直方图(图像,直方图结构,不累加,掩码)肤色直方图
cvCalcHist(planes2, hist_test_hand, 0, 0); //计算直方图(图像,直方图结构,不累加,掩码)测试直方图
cvCalcHist(planes3, hist_model_cup, 0, 0); //计算直方图(图像,直方图结构,不累加,掩码)杯色直方图
cvCalcHist(planes4, hist_test_cup, 0, 0); //计算直方图(图像,直方图结构,不累加,掩码)测试直方图
//直方图归一化
cvNormalizeHist(hist_model_hand, 1.0); //直方图归一化
cvNormalizeHist(hist_test_hand, 1.0); //直方图归一化
cvNormalizeHist(hist_model_cup, 1.0); //直方图归一化
cvNormalizeHist(hist_test_cup, 1.0); //直方图归一化
//绘制可视化直方图
int scale = 10; //直方图颜色值图像显示倍数
IplImage* Ihist_model_hand = cvCreateImage(cvSize(h_bins*scale, s_bins*scale), 8, 3); //300*320
IplImage* Ihist_test_hand = cvCreateImage(cvSize(h_bins*scale, s_bins*scale), 8, 3); //300*320
IplImage* Ihist_model_cup = cvCreateImage(cvSize(h_bins*scale, s_bins*scale), 8, 3); //300*320
IplImage* Ihist_test_cup = cvCreateImage(cvSize(h_bins*scale, s_bins*scale), 8, 3); //300*320
//直方图颜色值图像清零
cvZero(Ihist_model_hand);
cvZero(Ihist_test_hand);
cvZero(Ihist_model_cup);
cvZero(Ihist_test_cup);
//以小灰度块填充图像
float max_value_model_hand = 0; //直方图中最大值,为映射做准备
float max_value_test_hand = 0;
float max_value_model_cup = 0; //直方图中最大值,为映射做准备
float max_value_test_cup = 0;
cvGetMinMaxHistValue(hist_model_hand, NULL, &max_value_model_hand, NULL, NULL); //直方图最大值
cvGetMinMaxHistValue(hist_test_hand, NULL, &max_value_test_hand, NULL, NULL); //直方图最大值
cvGetMinMaxHistValue(hist_model_cup, NULL, &max_value_model_cup, NULL, NULL); //直方图最大值
cvGetMinMaxHistValue(hist_test_cup, NULL, &max_value_test_cup, NULL, NULL); //直方图最大值
for (int h = 0; h < h_bins; h++)
{
for (int s = 0; s < s_bins; s++)
{
float bin_val_model_hand = cvQueryHistValue_2D(hist_model_hand, h, s); //bin中的浮点数
float bin_val_test_hand = cvQueryHistValue_2D(hist_test_hand, h, s); //bin中的浮点数
float bin_val_model_cup = cvQueryHistValue_2D(hist_model_cup, h, s); //bin中的浮点数
float bin_val_test_cup = cvQueryHistValue_2D(hist_test_cup, h, s); //bin中的浮点数
int intensity1 = cvRound(bin_val_model_hand * 255 / max_value_model_hand); //映射到255空间
int intensity2 = cvRound(bin_val_test_hand * 255 / max_value_test_hand); //归一后太小
int intensity3 = cvRound(bin_val_model_cup * 255 / max_value_model_cup); //映射到255空间
int intensity4 = cvRound(bin_val_test_cup * 255 / max_value_test_cup); //归一后太小
cvRectangle(Ihist_model_hand, cvPoint(h*scale, s*scale), //绘制小灰度块填充图像
cvPoint((h + 1)*scale - 1, (s + 1)*scale - 1),
CV_RGB(intensity1, intensity1, intensity1), CV_FILLED);
cvRectangle(Ihist_test_hand, cvPoint(h*scale, s*scale),
cvPoint((h + 1)*scale - 1, (s + 1)*scale - 1),
CV_RGB(intensity2, intensity2, intensity2), CV_FILLED);
cvRectangle(Ihist_model_cup, cvPoint(h*scale, s*scale), //绘制小灰度块填充图像
cvPoint((h + 1)*scale - 1, (s + 1)*scale - 1),
CV_RGB(intensity3, intensity3, intensity3), CV_FILLED);
cvRectangle(Ihist_test_cup, cvPoint(h*scale, s*scale),
cvPoint((h + 1)*scale - 1, (s + 1)*scale - 1),
CV_RGB(intensity4, intensity4, intensity4), CV_FILLED);
}
}
CvSize hand_patch_size = cvSize(hand_patch_width, hand_patch_height); //手掌反向投影块尺寸
CvSize cup_patch_size = cvSize(cup_patch_width, cup_patch_height); //杯子反向投影块尺寸
//做区域检测器 采样窗口小于目标 测试图像数组 块的反向投影图像 块大小 模板直方图 比较方式(相关) 归一化水平
cvCalcArrBackProjectPatch((CvArr **)planes2, Iback_projection_patch_hand, hand_patch_size, hist_model_hand, CV_COMP_CORREL, 1);
//做目标检测器 采样窗口等于目标 测试图像数组 块的反向投影图像 块大小 模板直方图 比较方式(相关) 归一化水平
cvCalcArrBackProjectPatch((CvArr **)planes4, Iback_projection_patch_cup, cup_patch_size, hist_model_cup, CV_COMP_CORREL, 1);
cvNamedWindow("Mask_Hand", 1);
cvNamedWindow("Model_Hand", 1);
cvNamedWindow("Test_Hand", 1);
cvNamedWindow("HIST_Model_Hand", 1);
cvNamedWindow("HIST_Test_Hand", 1);
cvNamedWindow("BACK_Projection_Hand", 1);
cvNamedWindow("Mask_Cup", 1);
cvNamedWindow("Model_Cup", 1);
cvNamedWindow("Test_Cup", 1);
cvNamedWindow("HIST_Model_Cup", 1);
cvNamedWindow("HIST_Test_Cup", 1);
cvNamedWindow("BACK_Projection_Cup", 1);
cvShowImage("Mask_Hand", Ihand_mask);
cvShowImage("Model_Hand", Ihand_model);
cvShowImage("Test_Hand", Ihand_test);
cvShowImage("HIST_Model_Hand", Ihist_model_hand);
cvShowImage("HIST_Test_Hand", Ihist_test_hand);
cvShowImage("BACK_Projection_Hand", Iback_projection_patch_hand);
cvShowImage("Mask_Cup", Icup_mask);
cvShowImage("Model_Cup", Icup_model);
cvShowImage("Test_Cup", Icup_test);
cvShowImage("HIST_Model_Cup", Ihist_model_cup);
cvShowImage("HIST_Test_Cup", Ihist_test_cup);
cvShowImage("BACK_Projection_Cup", Iback_projection_patch_cup);
cvWaitKey(0);
//system("pause");
cvReleaseHist(&hist_model_hand);
cvReleaseHist(&hist_test_hand);
cvReleaseHist(&hist_model_cup);
cvReleaseHist(&hist_test_cup);
cvReleaseImage(&Ihand_model);
cvReleaseImage(&Ihand_test);
cvReleaseImage(&Ihand_mask);
cvReleaseImage(&hsv1);
cvReleaseImage(&hsv2);
cvReleaseImage(&hsv3);
cvReleaseImage(&hsv4);
cvReleaseImage(&Icup_model);
cvReleaseImage(&Icup_test);
cvReleaseImage(&Icup_mask);
cvReleaseImage(&h_plane_1);
cvReleaseImage(&s_plane_1);
cvReleaseImage(&v_plane_1);
cvReleaseImage(&h_plane_2);
cvReleaseImage(&s_plane_2);
cvReleaseImage(&v_plane_2);
cvReleaseImage(&h_plane_3);
cvReleaseImage(&s_plane_3);
cvReleaseImage(&v_plane_3);
cvReleaseImage(&h_plane_4);
cvReleaseImage(&s_plane_4);
cvReleaseImage(&v_plane_4);
cvReleaseImage(&Ihist_model_hand);
cvReleaseImage(&Ihist_test_hand);
cvReleaseImage(&Ihist_model_cup);
cvReleaseImage(&Ihist_test_cup);
cvReleaseImage(&Iback_projection_patch_hand);
cvReleaseImage(&Iback_projection_patch_cup);
cvDestroyAllWindows();
}














 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









