







上一节提到,通常情况下哈希函数的输入空间远大于输出空间,因此理论上哈希冲突是不可避免的。比如,输入空间为全体整数,输出空间为数组容量大小,则必然有多个整数映射至同一桶索引。
哈希冲突会导致查询结果错误,严重影响哈希表的可用性。为解决该问题,我们可以每当遇到哈希冲突就进行哈希表扩容,直至冲突消失为止。此方法简单粗暴且有效,但效率太低,因为哈希表扩容需要进行大量的数据搬运与哈希值计算。为了提升效率,我们可以采用以下策略。
- 改良哈希表数据结构,使得哈希表可以在出现哈希冲突时正常工作。
- 仅在必要时,即当哈希冲突比较严重时,才执行扩容操作。
哈希表的结构改良方法主要包括“链式地址”和“开放寻址”。
11.1 链式地址
在原始哈希表中,每个桶仅能存储一个键值对。链式地址(separate chaining)将单个元素转换为链表,将键值对作为链表节点,将所有发生冲突的键值对都存储在同一链表中。下图展示了一个链式地址哈希表的例子。

基于链式地址实现的哈希表的操作方法发生了以下变化。
- 查询元素:输入
key,经过哈希函数得到桶索引,即可访问链表头节点,然后遍历链表并对比key以查找目标键值对。 - 添加元素:首先通过哈希函数访问链表头节点,然后将节点(键值对)添加到链表中。
- 删除元素:根据哈希函数的结果访问链表头部,接着遍历链表以查找目标节点并将其删除。
链式地址存在以下局限性。
- 占用空间增大,链表包含节点指针,它相比数组更加耗费内存空间。
- 查询效率降低,因为需要线性遍历链表来查找对应元素。
以下代码给出了链式地址哈希表的简单实现,需要注意两点。
- 使用列表(动态数组)代替链表,从而简化代码。在这种设定下,哈希表(数组)包含多个桶,每个桶都是一个列表。
- 以下实现包含哈希表扩容方法。当负载因子超过 2/3 时,我们将哈希表扩容至原先的 2 倍。
/* 链式地址哈希表 */ class HashMapChaining { private: int size; // 键值对数量 int capacity; // 哈希表容量 double loadThres; // 触发扩容的负载因子阈值 int extendRatio; // 扩容倍数 vector<vector<Pair *>> buckets; // 桶数组 public: /* 构造方法 */ HashMapChaining() : size(0), capacity(4), loadThres(2.0 / 3.0), extendRatio(2) { buckets.resize(capacity); } /* 析构方法 */ ~HashMapChaining() { for (auto &bucket : buckets) { for (Pair *pair : bucket) { // 释放内存 delete pair; } } } /* 哈希函数 */ int hashFunc(int key) { return key % capacity; } /* 负载因子 */ double loadFactor() { return (double)size / (double)capacity; } /* 查询操作 */ string get(int key) { int index = hashFunc(key); // 遍历桶,若找到 key 则返回对应 val for (Pair *pair : buckets[index]) { if (pair->key == key) { return pair->val; } } // 若未找到 key 则返回空字符串 return ""; } /* 添加操作 */ void put(int key, string val) { // 当负载因子超过阈值时,执行扩容 if (loadFactor() > loadThres) { extend(); } int index = hashFunc(key); // 遍历桶,若遇到指定 key ,则更新对应 val 并返回 for (Pair *pair : buckets[index]) { if (pair->key == key) { pair->val = val; return; } } // 若无该 key ,则将键值对添加至尾部 buckets[index].push_back(new Pair(key, val)); size++; } /* 删除操作 */ void remove(int key) { int index = hashFunc(key); auto &bucket = buckets[index]; // 遍历桶,从中删除键值对 for (int i = 0; i < bucket.size(); i++) { if (bucket[i]->key == key) { Pair *tmp = bucket[i]; bucket.erase(bucket.begin() + i); // 从中删除键值对 delete tmp; // 释放内存 size--; return; } } } /* 扩容哈希表 */ void extend() { // 暂存原哈希表 vector<vector<Pair *>> bucketsTmp = buckets; // 初始化扩容后的新哈希表 capacity *= extendRatio; buckets.clear(); buckets.resize(capacity); size = 0; // 将键值对从原哈希表搬运至新哈希表 for (auto &bucket : bucketsTmp) { for (Pair *pair : bucket) { put(pair->key, pair->val); // 释放内存 delete pair; } } } /* 打印哈希表 */ void print() { for (auto &bucket : buckets) { cout << "["; for (Pair *pair : bucket) { cout << pair->key << " -> " << pair->val << ", "; } cout << "]\n"; } } };值得注意的是,当链表很长时,查询效率 O(n) 很差。此时可以将链表转换为“AVL 树”或“红黑树”,从而将查询操作的时间复杂度优化至 O(logn) 。
11.2 开放寻址
开放寻址(open addressing)不引入额外的数据结构,而是通过“多次探测”来处理哈希冲突,探测方式主要包括线性探测、平方探测、多次哈希等。
下面以线性探测为例,介绍开放寻址哈希表的工作机制。
11.2.1 线性探测
线性探测采用固定步长的线性搜索来进行探测,其操作方法与普通哈希表有所不同。
- 插入元素:通过哈希函数计算桶索引,若发现桶内已有元素,则从冲突位置向后线性遍历(步长通常为 1 ),直至找到空桶,将元素插入其中。
- 查找元素:若发现哈希冲突,则使用相同步长向后线性遍历,直到找到对应元素,返回
value即可;如果遇到空桶,说明目标元素不在哈希表中,返回 None 。
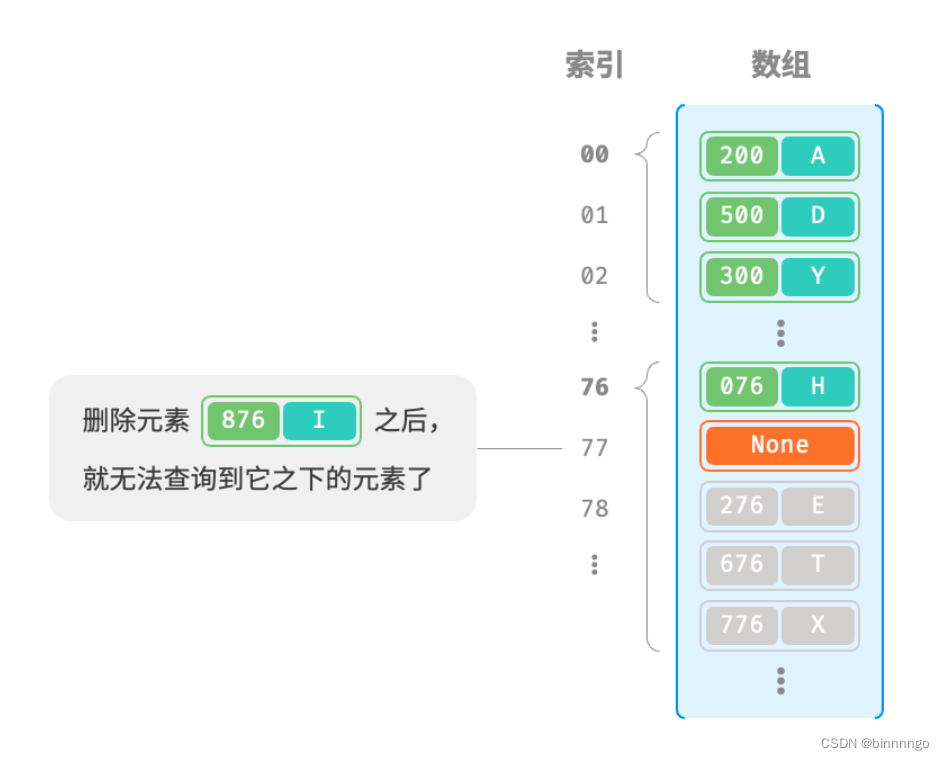
下图展示了开放寻址(线性探测)哈希表的键值对分布。根据此哈希函数,最后两位相同的 key 都会被映射到相同的桶。而通过线性探测,它们被依次存储在该桶以及之下的桶中。

然而,线性探测容易产生“聚集现象”。具体来说,数组中连续被占用的位置越长,这些连续位置发生哈希冲突的可能性越大,从而进一步促使该位置的聚堆生长,形成恶性循环,最终导致增删查改操作效率劣化。
值得注意的是,我们不能在开放寻址哈希表中直接删除元素。这是因为删除元素会在数组内产生一个空桶 None ,而当查询元素时,线性探测到该空桶就会返回,因此在该空桶之下的元素都无法再被访问到,程序可能误判这些元素不存在。
为了解决该问题,我们可以采用懒删除(lazy deletion)机制:它不直接从哈希表中移除元素,而是利用一个常量 TOMBSTONE 来标记这个桶。在该机制下,None 和 TOMBSTONE 都代表空桶,都可以放置键值对。但不同的是,线性探测到 TOMBSTONE 时应该继续遍历,因为其之下可能还存在键值对。
然而,懒删除可能会加速哈希表的性能退化。这是因为每次删除操作都会产生一个删除标记,随着 TOMBSTONE 的增加,搜索时间也会增加,因为线性探测可能需要跳过多个 TOMBSTONE 才能找到目标元素。
为此,考虑在线性探测中记录遇到的首个 TOMBSTONE 的索引,并将搜索到的目标元素与该 TOMBSTONE 交换位置。这样做的好处是当每次查询或添加元素时,元素会被移动至距离理想位置(探测起始点)更近的桶,从而优化查询效率。
以下代码实现了一个包含懒删除的开放寻址(线性探测)哈希表。为了更加充分地使用哈希表的空间,我们将哈希表看作一个“环形数组”,当越过数组尾部时,回到头部继续遍历。
/* 开放寻址哈希表 */
class HashMapOpenAddressing {
private:
int size; // 键值对数量
int capacity = 4; // 哈希表容量
const double loadThres = 2.0 / 3.0; // 触发扩容的负载因子阈值
const int extendRatio = 2; // 扩容倍数
vector<Pair *> buckets; // 桶数组
Pair *TOMBSTONE = new Pair(-1, "-1"); // 删除标记
public:
/* 构造方法 */
HashMapOpenAddressing() : size(0), buckets(capacity, nullptr) {
}
/* 析构方法 */
~HashMapOpenAddressing() {
for (Pair *pair : buckets) {
if (pair != nullptr && pair != TOMBSTONE) {
delete pair;
}
}
delete TOMBSTONE;
}
/* 哈希函数 */
int hashFunc(int key) {
return key % capacity;
}
/* 负载因子 */
double loadFactor() {
return (double)size / capacity;
}
/* 搜索 key 对应的桶索引 */
int findBucket(int key) {
int index = hashFunc(key);
int firstTombstone = -1;
// 线性探测,当遇到空桶时跳出
while (buckets[index] != nullptr) {
// 若遇到 key ,返回对应桶索引
if (buckets[index]->key == key) {
// 若之前遇到了删除标记,则将键值对移动至该索引
if (firstTombstone != -1) {
buckets[firstTombstone] = buckets[index];
buckets[index] = TOMBSTONE;
return firstTombstone; // 返回移动后的桶索引
}
return index; // 返回桶索引
}
// 记录遇到的首个删除标记
if (firstTombstone == -1 && buckets[index] == TOMBSTONE) {
firstTombstone = index;
}
// 计算桶索引,越过尾部返回头部
index = (index + 1) % capacity;
}
// 若 key 不存在,则返回添加点的索引
return firstTombstone == -1 ? index : firstTombstone;
}
/* 查询操作 */
string get(int key) {
// 搜索 key 对应的桶索引
int index = findBucket(key);
// 若找到键值对,则返回对应 val
if (buckets[index] != nullptr && buckets[index] != TOMBSTONE) {
return buckets[index]->val;
}
// 若键值对不存在,则返回空字符串
return "";
}
/* 添加操作 */
void put(int key, string val) {
// 当负载因子超过阈值时,执行扩容
if (loadFactor() > loadThres) {
extend();
}
// 搜索 key 对应的桶索引
int index = findBucket(key);
// 若找到键值对,则覆盖 val 并返回
if (buckets[index] != nullptr && buckets[index] != TOMBSTONE) {
buckets[index]->val = val;
return;
}
// 若键值对不存在,则添加该键值对
buckets[index] = new Pair(key, val);
size++;
}
/* 删除操作 */
void remove(int key) {
// 搜索 key 对应的桶索引
int index = findBucket(key);
// 若找到键值对,则用删除标记覆盖它
if (buckets[index] != nullptr && buckets[index] != TOMBSTONE) {
delete buckets[index];
buckets[index] = TOMBSTONE;
size--;
}
}
/* 扩容哈希表 */
void extend() {
// 暂存原哈希表
vector<Pair *> bucketsTmp = buckets;
// 初始化扩容后的新哈希表
capacity *= extendRatio;
buckets = vector<Pair *>(capacity, nullptr);
size = 0;
// 将键值对从原哈希表搬运至新哈希表
for (Pair *pair : bucketsTmp) {
if (pair != nullptr && pair != TOMBSTONE) {
put(pair->key, pair->val);
delete pair;
}
}
}
/* 打印哈希表 */
void print() {
for (Pair *pair : buckets) {
if (pair == nullptr) {
cout << "nullptr" << endl;
} else if (pair == TOMBSTONE) {
cout << "TOMBSTONE" << endl;
} else {
cout << pair->key << " -> " << pair->val << endl;
}
}
}
};
11.2.2 平方探测
平方探测与线性探测类似,都是开放寻址的常见策略之一。当发生冲突时,平方探测不是简单地跳过一个固定的步数,而是跳过“探测次数的平方”的步数,即 1,4,9,… 步。
平方探测主要具有以下优势。
- 平方探测通过跳过平方的距离,试图缓解线性探测的聚集效应。
- 平方探测会跳过更大的距离来寻找空位置,有助于数据分布得更加均匀。
然而,平方探测也并不是完美的。
- 仍然存在聚集现象,即某些位置比其他位置更容易被占用。
- 由于平方的增长,平方探测可能不会探测整个哈希表,这意味着即使哈希表中有空桶,平方探测也可能无法访问到它。
11.2.3 多次哈希
顾名思义,多次哈希方法使用多个哈希函数 f1(x)、f2(x)、f3(x)、… 进行探测。
- 插入元素:若哈希函数 f1(x) 出现冲突,则尝试 f2(x) ,以此类推,直到找到空桶后插入元素。
- 查找元素:在相同的哈希函数顺序下进行查找,直到找到目标元素时返回;若遇到空桶或已尝试所有哈希函数,说明哈希表中不存在该元素,则返回 None 。
与线性探测相比,多次哈希方法不易产生聚集,但多个哈希函数会带来额外的计算量。
11.3 编程语言的选择
各个编程语言采取了不同的哈希表实现策略,以下举几个例子。
- Python 采用开放寻址。字典 dict 使用伪随机数进行探测。
- Java 采用链式地址。自 JDK 1.8 以来,当 HashMap 内数组长度达到 64 且链表长度达到 8 时,链表会转换为红黑树以提升查找性能。
- Go 采用链式地址。Go 规定每个桶最多存储 8 个键值对,超出容量则连接一个溢出桶。当溢出桶过多时,会执行一次特殊的等量扩容操作,以确保性能。
















 841
841











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











