






 本文详细介绍了步进电机的工作原理、分类和主要参数,包括磁阻式、永磁式和混合式步进电机的特点。步进电机通过电脉冲信号转换为角位移,其性能取决于相数、拍数和步距角等参数。此外,文章还提到了常用的A3977SLPTR驱动芯片及其引脚功能,以及步进电机在实际应用中的注意事项,如启动频率和细分选择。
本文详细介绍了步进电机的工作原理、分类和主要参数,包括磁阻式、永磁式和混合式步进电机的特点。步进电机通过电脉冲信号转换为角位移,其性能取决于相数、拍数和步距角等参数。此外,文章还提到了常用的A3977SLPTR驱动芯片及其引脚功能,以及步进电机在实际应用中的注意事项,如启动频率和细分选择。
简介
步进电机是一种将**电脉冲信号**转换成**相应角位移或线位移**的电动机。每输入一个脉冲信号,转子就转动一个角度或前进一步,其输出的角位移或线位移与输入的脉冲数成正比,转速与脉冲频率成正比。因此,步进电动机又称脉冲电动机。
分类
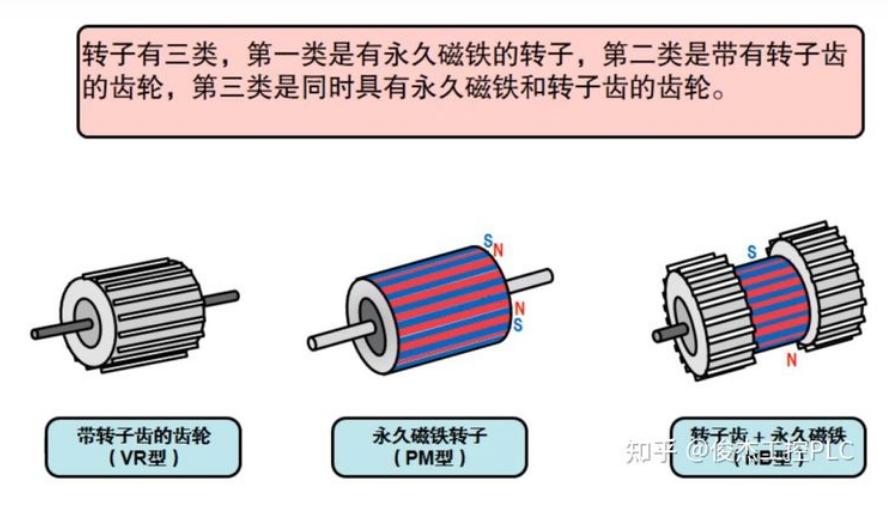
按励磁方式分为磁阻式、永磁式和混磁式三种;
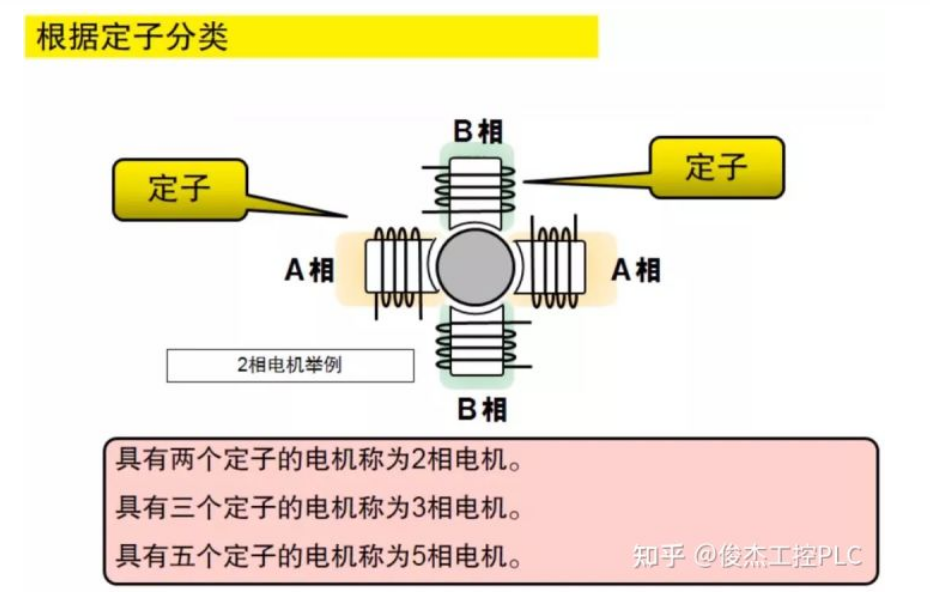
按相数可分为单相、两相、三相和多相等形式
1)磁阻式步进电机又称反应式步进电机,一般为三相,可实现大转矩输出,步进角一般为1.5°,但噪声和震动都很大。
定子上有绕组,绕组由软磁材料组成。其结构简单、成本低、步距角小,可达1.2度,但动态性能差,效率低、发热大,可靠性难以保证。
2)永磁式步进电机一般为两相,转矩和体积都比较小,步距角一般为7.5°或15°。
永磁式步进电机的转子用永磁材料制成,转子的极数与定子的极数相同。其特点是动态性能好、输出力矩大,但这种电机度差,步距角大(一般为7.5度或15度)
3)混合式综合了磁阻式和永磁式的优点,分为两相和五相,两相步进角一般为1.8°,五相步进角一般为0.72°,这种步进电机应用最为广泛。
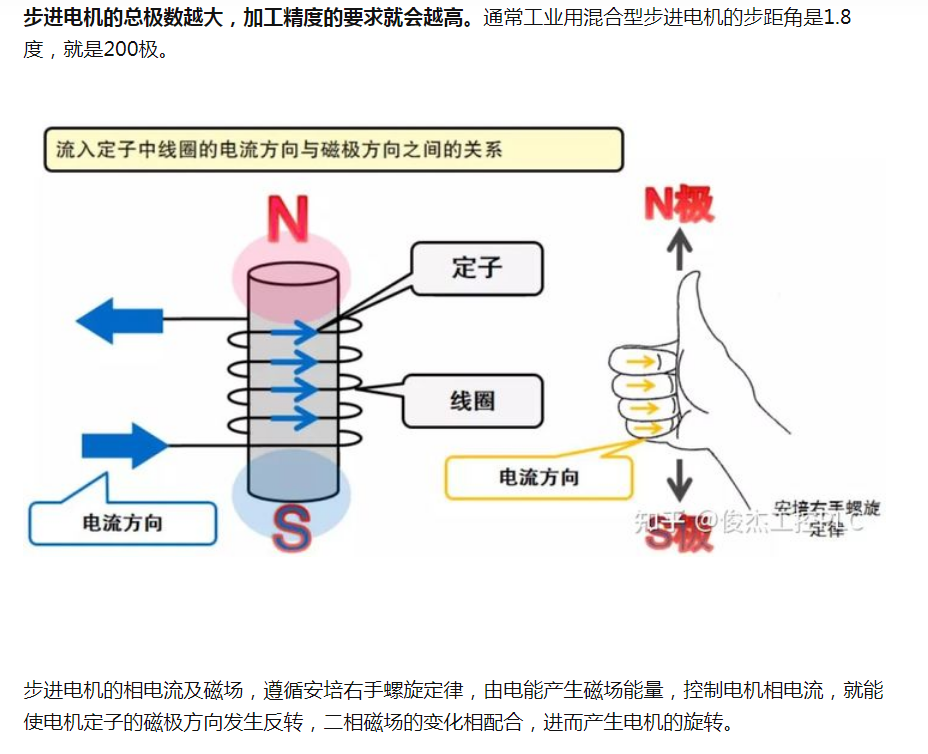
混合式步进电机综合了反应式和永磁式的优点,其定子上有很多相绕组,转子上采用永磁材料,转子和定子均有多个小齿以提高步距精度。其特点是输出力矩大、动态性能好、步距角小,但结构复杂、成本相对较高目前最受欢迎的是两相混合式步进电机,约占97%以上的市场份额,其原因是性价比高,配上细分驱动器后效果良好。该种电机的基本步距角为1.8度/步,配上半步驱动器后,步距角减少为0.9度,配上细分驱动器后。其步距角可细分达256倍(0.007度/微步)
步进电机参数
1、相数——步进电机的线圈对数(常见的相数为二、三、四、五相,电机相数不同,步距角也不同)
2、拍数——转子转动一周,定子绕组通电的次数
3、步距角——步进电机接收到一个脉冲信号后,驱动电机按设定的方向转动的一个固定角度。(由转子齿数和运行拍数决定
的,一般较大),可以称之为电机固有步距角,并不一定是电机工作时的真正步距角。
步距角θ=360°/mzc
注:m为定子相数;z为转子齿数;c为通电方式(1:单相轮流通电,双向轮流通电;2:单双向轮流通电方式)。
转速公式:n=60f/P(n为转速;f为脉冲频率;P为磁极对数)
扭矩公式:T=9550P/n(P为输出功率,单位Kw;n为电机转速,单位r/min)
4、保持转矩(静转矩)——步进电机通电但没有转动时,定子锁住转子的力矩。
通常步进电机在低速时的力矩接近保持转矩。步进电机的输出转矩随着速度的增大而不断衰减,输出功率也随着速度的增
大而变化。常说的2NM步进电机,在没有特殊情况说明下,指得就是保持转矩为2NM的步进电机。
5、精度——一般步进电机的精度为步进角的3-5%,且不累计。
6、空载启动频率——步进电机在空载情况下能够正常启动的脉冲频率,如果脉冲频率高于该值,电机不能正常启动,可能发
生丢步或堵转。在有负载的情况下,电机的启动频率应更低。应经过低启动频率,然后慢慢到达高频。
7、线数——步进电机引出线的条数
8、定位转矩——电机在不通电的状态下,电机转子自身的锁定力矩(由磁场齿形的谐波和机械误差造成的)
9、失调角——转子齿轴线偏移定子齿轴线的角度,电机运转必存在失调角,由失调角产生的误差,采用细分驱动是不能解决
的。
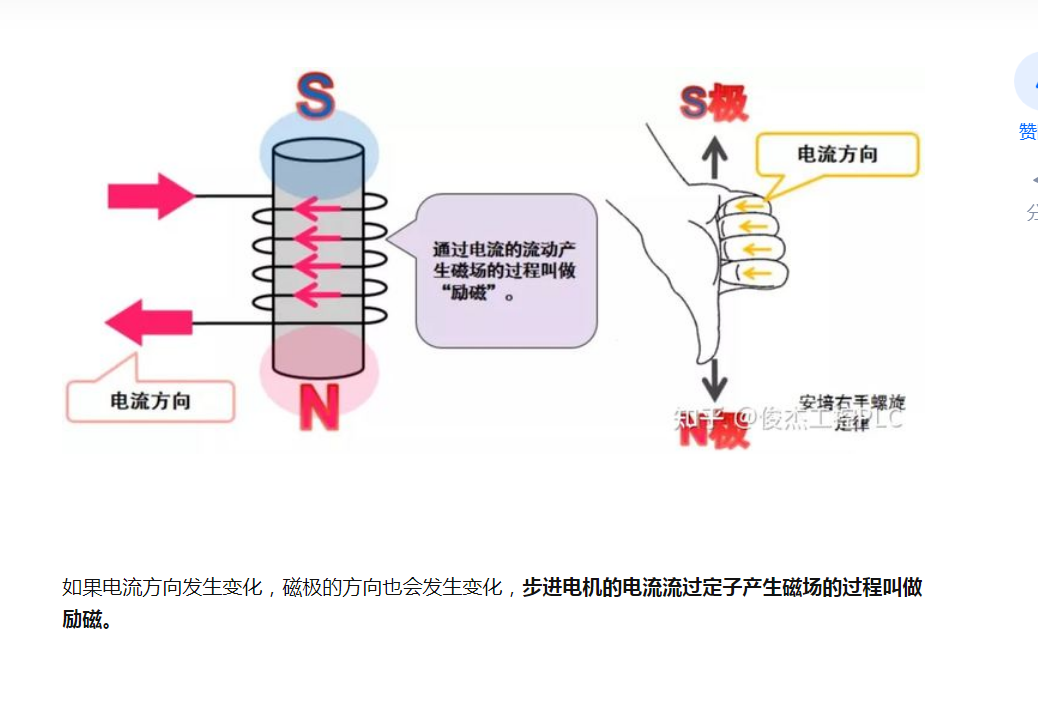
在做项目总结的时候,发现有一个关于步进电机的理解点还是有问题的
–》我们采用的是两相四线时步进电机时,采用驱动芯片为A3977slptr,这里面需要注意的是方向驱动引脚DIR(用于确定电机旋转方向),步进(STEP)、芯片使能脚(ENABLE)、用于是否细分选择引脚(MS1,MS2)。
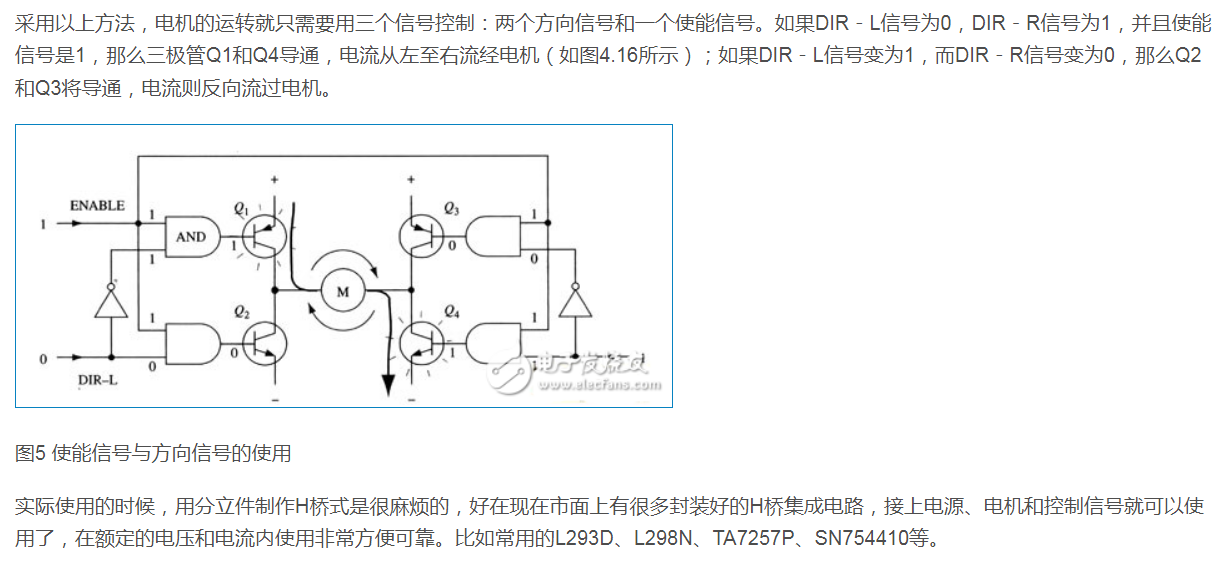
–》需要了解H桥电路工作原理(https://blog.csdn.net/Loadingzc/article/details/81704320)这个网址讲解的比较好

















 2799
2799

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









