




 本文介绍OpenCV中Harris角点检测方法cornerHarris的使用,包括输入参数如滑块窗口尺寸、Sobel边缘检测滤波器大小等,及如何设置阈值函数threshold和compare函数进行图像处理,适用于计算机视觉和图像处理领域的开发者。
本文介绍OpenCV中Harris角点检测方法cornerHarris的使用,包括输入参数如滑块窗口尺寸、Sobel边缘检测滤波器大小等,及如何设置阈值函数threshold和compare函数进行图像处理,适用于计算机视觉和图像处理领域的开发者。
本文重在代码实现,不多涉及理论知识,对网上资料的一个整理
1、opencv harris角点检测方法cornerHarris
void cornerHarris(InputArray src, // 输入8bit单通道灰度Mat矩阵
OutputArray dst, // 用于保存harris角点检测结果
int blockSize, // 滑块窗口的尺寸
int ksize, // sobel边缘检测滤波器大小
double k, // harris中间参数,经校验0.04-0.06
int borderType = BORDER_DEFAULT); // 插值类型
2、阈值函数threshold
void threshold(Mat& src,
Mat& dst,
double thresh, // 为当前阈值
double maxVal, // 当第5个参数阈值类型为CV_THRESH_BINARY 和 CV_THRESH_BINARY_INV 时的最大值。
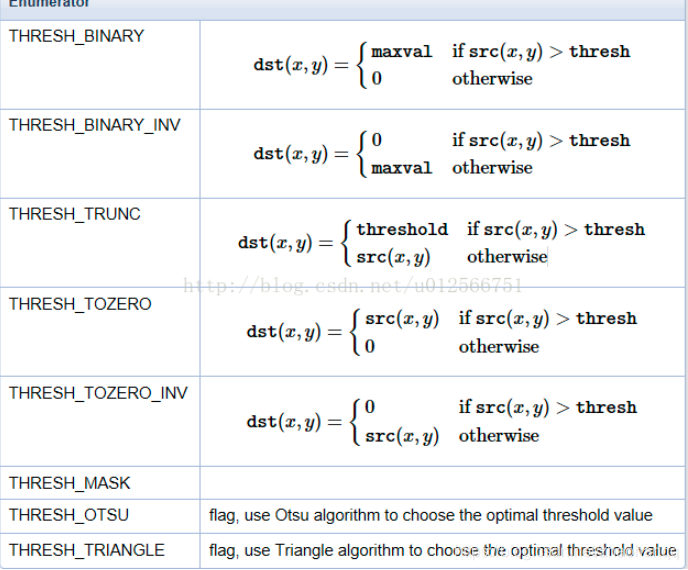
int thresholdType);
thresholdType取值如下
3、compare函数
void compare(InputArray src1, // 原始图像1(必须是单通道)或者一个数值
InputArray src2, // 原始图像2(必须是单通道)或者一个数值
OutputArray dst, // 结果图像,类型是CV_8UC1,即单通道8位图,大小和src1和src2中最大的那个一样,比较结果为真的地方值为255,否则为0;
int cmpop);
cmpop:操作类型,有以下几种类型:
enum { CMP_EQ=0, //相等
CMP_GT=1, //大于
CMP_GE=2, //大于等于
CMP_LT=3, //小于
CMP_LE=4, //小于等于
CMP_NE=5 }; //不相等

















 908
908

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









