






摘要
我的实习项目是设计红外倒车雷达,通过雷达报警来提醒驾驶人及时注意,以提高倒车安全性。这款红外倒车雷达具有电路结构简单、成本低、工作稳定等特点,适用于各种测距场合。电路采用红外发射管和红外接收管作为传感器件,核心元件包括NE555和运放LM324。NE555构成多谐振振荡电路用于发射红外波信号,LM324主要用于放大红外接收信号并构成电压比较器电路,发光二极管用于指示倒车距离范围。
在设计电路之前,我先了解了红外倒车雷达的工作原理,并研究了NE555多谐振振荡电路和运算电路的基本工作状态。然后,我通过绘制电路仿真图来模拟电路设计,以确保实际电路能够正常工作。接下来,我绘制了PCB布局图,以了解电路器件的摆放位置,为下一步的电路焊接做好准备。虽然电路结构简单,但在焊接电路板时仍然遇到了一些器件焊接不到位的问题。最后,我进行了调试工作,通过调整障碍物与发射管和接收管之间的距离来模拟真实的倒车情况。
关键词:倒车雷达;NE555芯片;LM324芯片;红外发射接收管
目录
1设计任务及要求............................................................................................................................. 1
1.1技术要求.............................................................................................................................. 1
1.2主要任务.............................................................................................................................. 1
2方案论证....................................................................................................................................... 1
2.1方案一.................................................................................................................................. 1
2.2方案二.................................................................................................................................. 1
3单元电路设计................................................................................................................................ 3
3.1 RC振荡产生频率................................................................................................................. 3
3.2功放电路.............................................................................................................................. 4
4总体电路设计与测试..................................................................................................................... 4
4.1软件仿真与调试................................................................................................................... 4
4.1硬件仿真与调试................................................................................................................... 5
5体会............................................................................................................................................... 7
6 系统使用的元器件清单................................................................................................................. 8
7 参考文献...................................................................................................................................... 8
8 附录.............................................................................................................................................. 9
(1)NE555资料...................................................................................................................... 9
(2)LM386资料.................................................................................................................... 10
1设计任务及要求
1.1技术要求
(1)反射距离和灵敏度可调;
(2)可以尝试距离30cm时LED3亮,距离20cm时LED2和LED3亮,距离10cm时全亮。建议红外传感器上方用白纸遮挡反射效果最好。
1.2主要任务
(1)按照技术要求,提出自己的设计方案(多种,芯片不限)并进行比较;
(2)查阅资料,确定所需各元器件型号和参数(采用红外对管、LM324、NE555定时器、若干电阻和电容等器件实现);
(3)根据设计的实现方案,在multism或protues软件上画出电路图并进行仿真;
(4)焊接电路、自拟调整测试方法,使其尽可能达到设计指标要求;
(5)撰写设计说明书,进行答辩。
2方案论证
2.1方案一
555定时器与电阻、电容等组成可控多谐振荡器,振荡频率取决于电阻的不同阻值。方案一电路原理框图如图2-1所示。

图2-1方案一电路原理框图
本系统采用NE555芯片和外围元件组成多谐振荡器电路,产生用于驱动红外线发射管的震荡电压,从而使发射管发射红外线信号。当红外线被物体反射回来后,红外线接收管将信号放大并送入LM324的第2脚。放大后的信号经过U2的第一脚输出,经过C3耦合、D1和C2整流滤波后,送入U2的三个比较器的反相输入端。这三个比较器的同相输入端连接了不同的电压参考。当反相输入端的电压高于同相输入端的电压时,相应的比较器输出低电平,使与其连接的发光二极管点亮。通过发光二极管点亮的个数来指示物体与系统之间的距离远近。
2.2方案二
本系统使用AT89C52单片机作为核心控制器,HC-SR04作为超声波距离传感器,显示屏用来显示障碍物的距离和位置。将超声波传感器的Echo和Trig端口分别连接到单片机的两个I/O端口,用于控制超声波传感器的测距操作。将LCD显示屏的数据线连接到单片机的另一个I/O端口,用于向显示屏发送数据。连接电源,为整个系统提供稳定的5V电源。当车辆挂入倒挡时,单片机开始工作并通过超声波传感器检测障碍物和距离。传感器将检测到的信号发送给单片机,单片机根据预设算法处理数据,确定障碍物的位置和距离。根据处理结果,单片机通过LCD显示屏显示障碍物的距离和位置,系统不断循环检测和显示,直到车辆完成倒车操作。方案二AT89C52单片机的倒车雷达系统仿真图如图2-2所示。
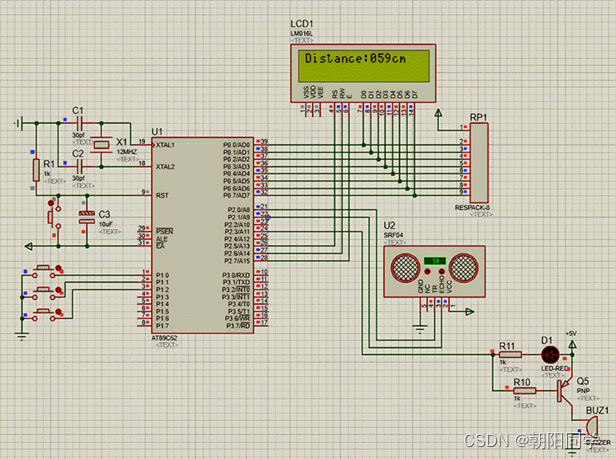
图2-2 方案二RC振荡仿真图
方案一与方案二对比分析:
(1)在器件方面,方案一需要更少电阻与电容,与方案二相比,在制作电路的时候更简单而且更廉价。
(2)与方案二相比,方案一中的555定时器内部的比较器灵敏度高,输入驱动电流大,功能灵活,而且它的振荡频率受电源电压和温度的影响很小。所以由555定时器构成的多协调振荡器的震荡频率稳定,不容易受干扰。
故本次设计采用方案一电路设计。
3单元电路设计
3.1NE555振荡电路
本系统采用NE555芯片和其他电阻、电容等元件构成可控多谐振荡器电路。NE555芯片和外围元件一起形成多谐振荡器电路,产生用于驱动红外线发射管的震荡电压,从而使发射管发射红外线信号。当红外线被物体反射回来后,红外线接收管接收并将信号送入LM324的第2脚进行放大。放大后的信号经过U2的第一脚输出,经过C3耦合、D1和C2整流滤波后,送入U2的三个比较器的反相输入端。这三个比较器的同相输入端连接了不同的电压参考。当反相输入端的电压高于同相输入端的电压时,相应的比较器输出低电平,使与其连接的发光二极管点亮。通过发光二极管点亮的个数来指示物体与系统之间的距离远近。NE555多谐振荡频率图如图3-1所示。
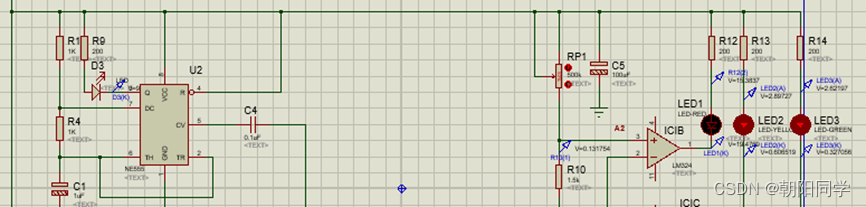
图3-1 NE555多谐振荡频率图
如上图3-1所示,振荡频率f可由如公式求得:f=1/(0.693*(2R4+R1)*C1),由公式可知,f仅与R1、R4、C1有关。
电阻R1、R4和电容C2共同构成了一个定时电路。定时电容C1上的电压UC作为高触发端TH(6脚)和低触发端TR(2脚)的外部触发电压。放电端DC(7脚)用于放电操作。电压控制端CV(5脚)用于控制电压的变化。直接复位端R(4脚)连接到高电平,使NE555处于非复位状态。输出端(3脚)在时间周期开始时会改变电位,直到达到比电源电压低1.7伏的高电位。在周期结束时,输出回到接近0伏的低电位。当输出处于高电位时,最大输出电流约为200mA。
另外,在计算频率时,还需注意:
多谐振荡器的放电时间常数分别为
充电期:tPH≈0.693×(R1+R4)×C1
放电期:tPL≈0.693×R4×C1
振荡周期T为
T=tPH+tPL≈0.693×(R1+2R4)×C1
3.2功放电路
本系统功放电路采用LM386功率放大器,LM386功放电路图如图3-2所示。
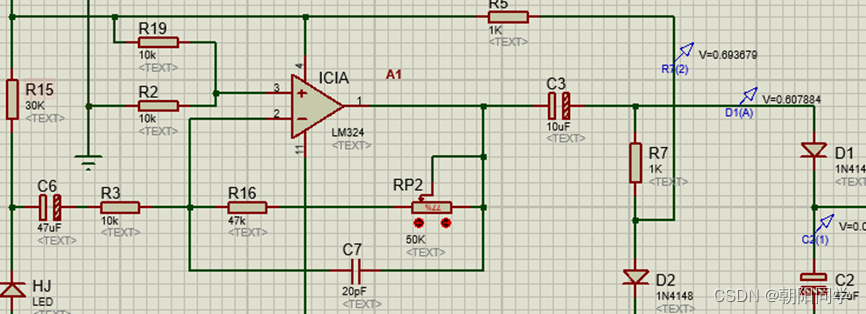
图3-2 LM386功放电路图
图3-3中,7脚所接容量为20μF 的电容为去耦滤波电容,虽为旁路电容,但必不可少。实际应用时,该端必须外接一个电解电容到地,起滤除噪声的作用。 工作稳定后,该管脚电压值约等于电源电压的一半。增大这个电容的容值,可有效抑制噪声。1脚与8 脚为电源增益设定端,其所接电容、电阻是用于调解电路的闭环电压增益,断开时即内定增益为20。如果用不到大的增益,电容C11 可以不接。不光省了成本,还可令噪声减少。5 脚为输出端,应外接输出电容后再接负载。该电容能隔离直流分量,避免电路出现故障出现直流分量损坏元器件;同时与扬声器构成高通滤波器,降低噪音。另要有电阻电容支路串联接地,因为扬声器是感性负载,能抵消扬声器的反电动势保护功放输出末级。本次简易电子琴实验为令增益最大化达到最佳效果,即增益效果为 200倍,因此保留电容C11并取值为10μF。
4总体电路设计与测试
4.1软件仿真与调试
总电路图由上面所述的单元电路组合而成。只需通过调整滑动变阻器的阻值模拟接收红外线改变电压,达到不同LED发光的效果。总电路仿真图如图4-1所示。
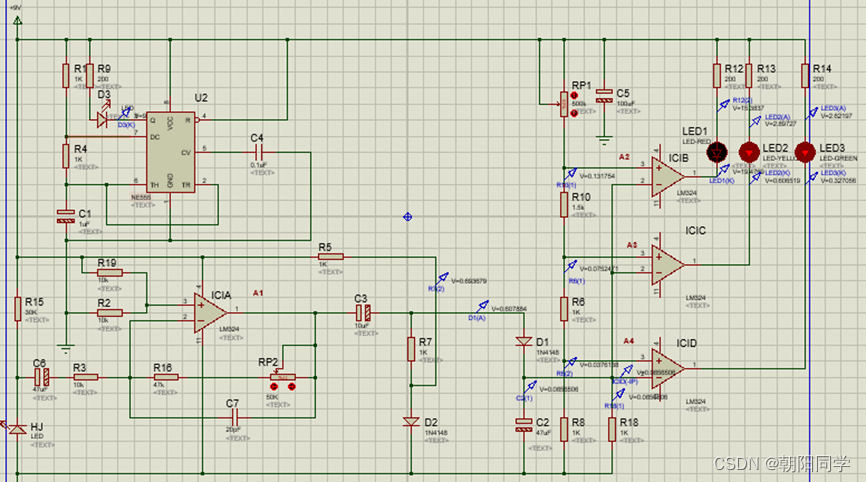
图4-1 总电路仿真图
测试结果如图4-2所示。此测试结果图分别为在滑动变阻器RP1=500kΩ,350kΩ,250 kΩ,100kΩ下,改变振荡电压下,模拟障碍物距离红外线接收器40cm,30cm,20cm,10cm时所对应的仿真图。
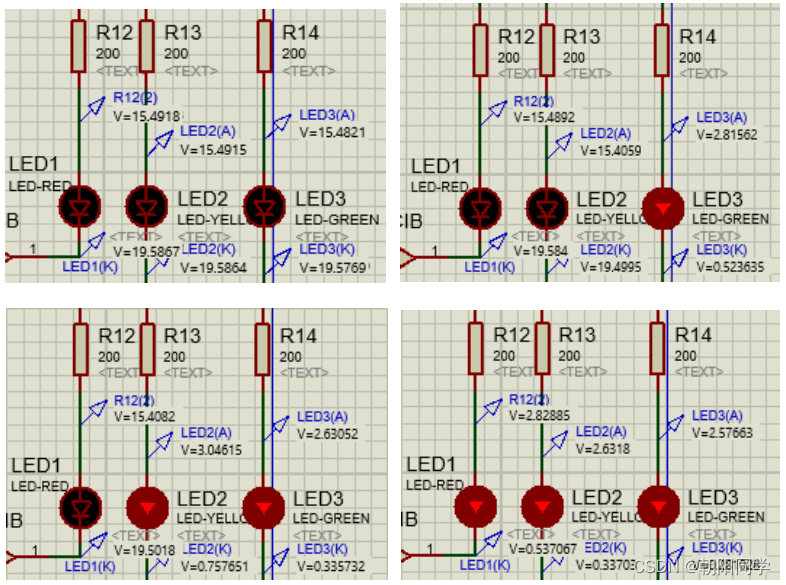
图4-2 测试结果图
4.2硬件仿真与调试
红外倒车雷达实物图如图4-3所示。此实物图采用9V直流电源供电,利用NE555多谐振荡频率和LM324运算放大器。通过改变障碍物对红外接收器的距离达到不同LED发光的效果。
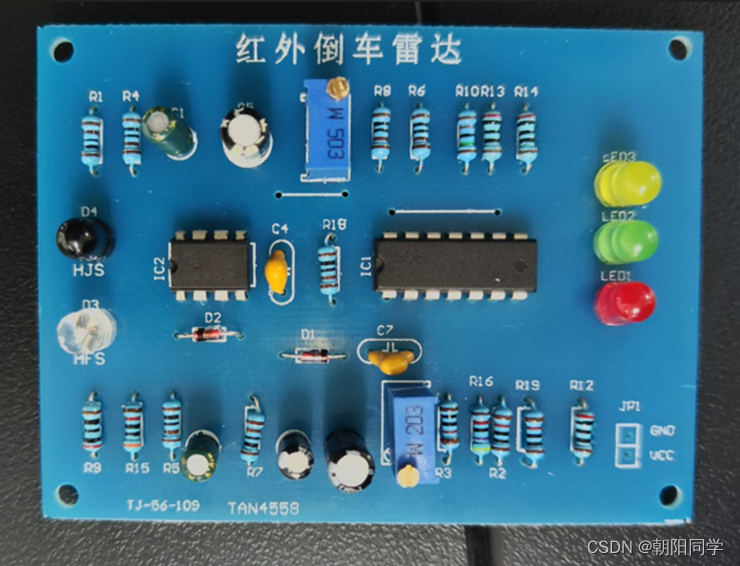
图4-3 红外倒车雷达实物图
红外倒车雷达实物测试结果如图4-4所示。此测试结果分别为在障碍物距离红外线接收器40cm,30cm,20cm,10cm时所对应的实物图。
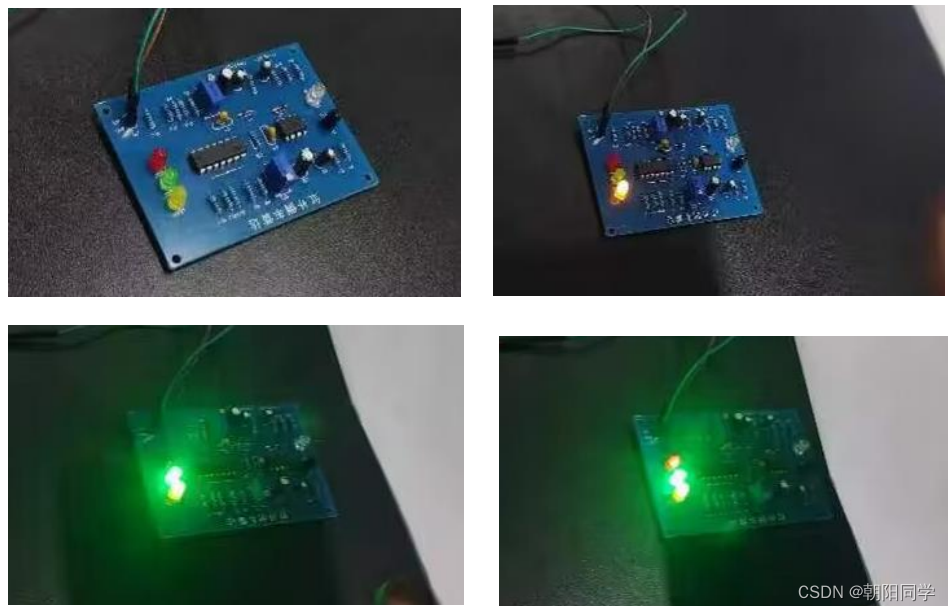
图4-4 红外倒车雷达实物测试结果图
红外倒车雷达原理图4-5所示,PCB图4-6所示。此图通过Altium Designer 22,加入所需元件库设计而成。
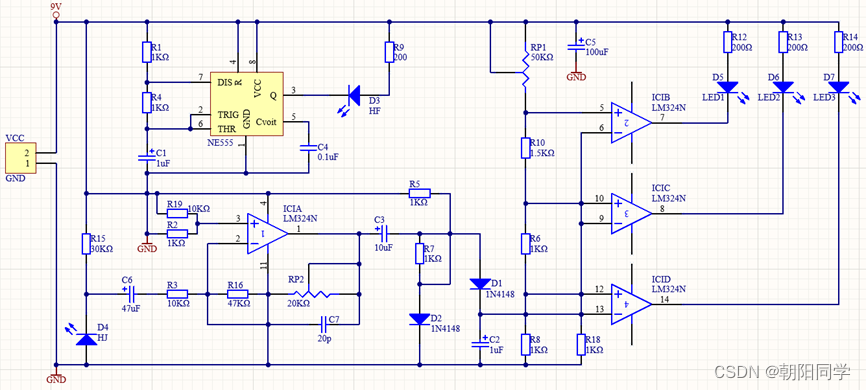
图4-5 倒车红外雷达原理图
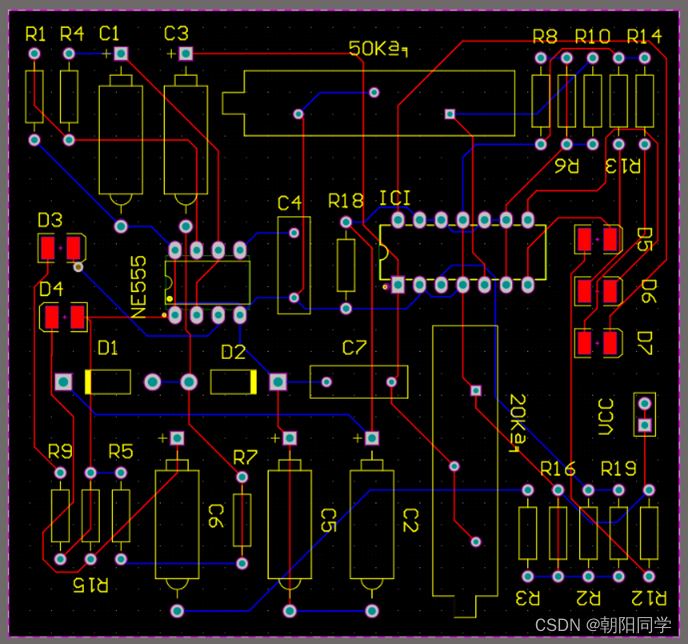
图4-6 倒车红外雷达PCB图
5体会
电路焊接过程中,由于一开始对器件不太了解,导致重焊的状况,还有器件比较集成,引脚间距短,容易把两个引脚连接在一起。
优点:电路设计简单,器件廉价,常见。电路稳定性好。
缺点:在实际情况中,可能会遇到红外接收器不够灵敏,导致无法准确在相应的距离时点亮灯。另外,电阻的阻值可能不够精确,使得变阻器调节不够灵敏。为了解决这些问题,在仿真过程中,可以使用电压计来测量各个支路的电压。通过比较电压比较器两端的电压值,可以进行准确的计算。
这次课程设计把学习的理论与实践相结合,提高了我们的动手能力,让我们了解了更多电路方面的实际知识,收获很大。
6 系统使用的元器件清单
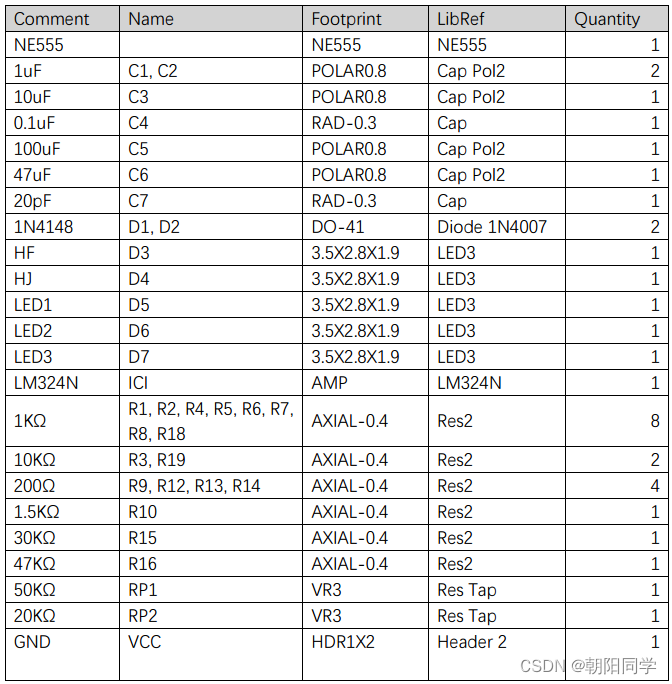
表6-1 红外倒车雷达元器件清单
7 参考文献
[1]廖先芸,电子技术实践与训练[M].北京:北京高等教育出版社,2018.
[2]张玮, 陈永志. 555集成电路在物理实验中的应用[J]. 科技风, 2019
[3]邱关源,罗先觉,电路(模拟部分第六版)[M].北京:高等教育出版社,2022.
[4]童诗白,华成英,模拟电子技术基础[M].北京:高等教育出版社,2022
[5]李香宇, 王文, 张静, 赵亚范. 基于Multisim的电子技术实验案例分析——以简易红外倒车雷达为例[J]. 中国现代教育装备, 2023
8 附录
(1)NE555资料
NE555 (Timer IC)为8脚时基集成电路,大约在1971年由Signetics Corporation发布,在当时是唯一非常快速且商业化的Timer IC,在往后的40年中非常普遍被使用,且延伸出许多的应用电路,后来基于CMOS技术版本的Timer IC如MOTOROLA的MC1455已被大量的使用,但原规格的NE555依然正常的在市场上供应,尽管新版IC在功能上有部份的改善,但其脚位功能并没变化,所以到目前都可直接的代用。
·供应电压4.5-18V·供应电流10-15ma·输出电流225mA (max)
·上升/下降时间100 ns
Pin 1 (接地) -地线(或共同接地) ,通常被连接到电路共同接地。
Pin 2 (触发点) -这个脚位是触发NE555使其启动它的时间周期。触发信号上缘电压须大于2/3 VCC,下缘须低于1/3 VCC 。
Pin 3 (输出) -当时间周期开始555的输出脚位,移至比电源电压少1.7伏的高电位。周期的结束输出回到O伏左右的低电位。于高电位时的最大输出电流大约200 mA 。
Pin 4 (重置) -一个低逻辑电位送至这个脚位时会重置定时器和使输出回到一个低电位。它通常被接到正电源或忽略不用。
Pin 5 (控制) -这个接脚准许由外部电压改变触发和闸限电压。当计时器经营在稳定或振荡的运作方式下,这输入能用来改变或调整输出频率。
Pin 6 (重置锁定) - Pin 6重置锁定并使输出呈低态。当这个接脚的电压从1/3 VCC电压以下移至2/3 VCC以上时启动这个动作。
Pin 7 (放电) -这个接脚和主要的输出接脚有相同的电流输出能力,当输出为ON时为LOW,对地为低阻抗,当输出为OFF时为HIGH,对地为高阻抗。
Pin 8 (V +) -这是555个计时器IC的正电源电压端。供应电压的范围是+4.5伏特(最小值)至+16伏特(最大值)。
(2)LM324资料
LM324系列是低成本的四路运算放大器,具有真正的差分输入。在单电源应用中,它们与标准运算放大器类型相比具有几个明显的优势。该四路放大器可以工作于低至3.0 V或高达32 V的电源电压,静态电流是MC1741的五分之一左右(每个放大器)。共模输入范围包括负电源,因此在众多应用中无需外部偏置元器件。输出电压范围也包括负电源电压。
包括传感器放大器,直流增益模块和所有传统的运算放大器可以更容易地在单电源系统中实现的电路。例如,可直接操作的LM324系列,这是用来在数字系统中,轻松地将提供所需的接口电路,而无需额外的±15V电源标准的5V电源电压。

















 1894
1894

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









