







libuv 是一个跨平台的异步事件驱动库,用于构建高性能和可扩展的网络应用程序。mediasoup 基于 libuv 构建了包括管道、信号和 socket 在内的一整套通信框架,具有单线程、事件驱动和异步的典型特征,是构建高性能 WebRTC 流媒体服务器的重要基础,本文主要分析 mediasoup 对 libuv 的封装。
1. Pipe 通信
Node.js 进程与 worker 进程之间使用管道通信,而且是双向通信。node.js 进程通过管道向 worker 进程发送请求,并接收响应。worker 进程也可以主动向 node.js 进程发送通知消息。
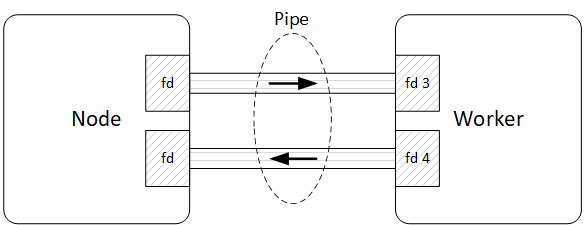
1.1. 文件描述符
管道通信需要使用两个文件描述符,node.js 进程的文件描述符定义如下:
this.#channel = new Channel({
producerSocket: this.#child.stdio[3],
consumerSocket: this.#child.stdio[4],
pid: this.#pid,
});worker 进程的文件描述符定义如下:
static constexpr int ConsumerChannelFd{ 3 };
static constexpr int ProducerChannelFd{ 4 };1.2. 静态结构
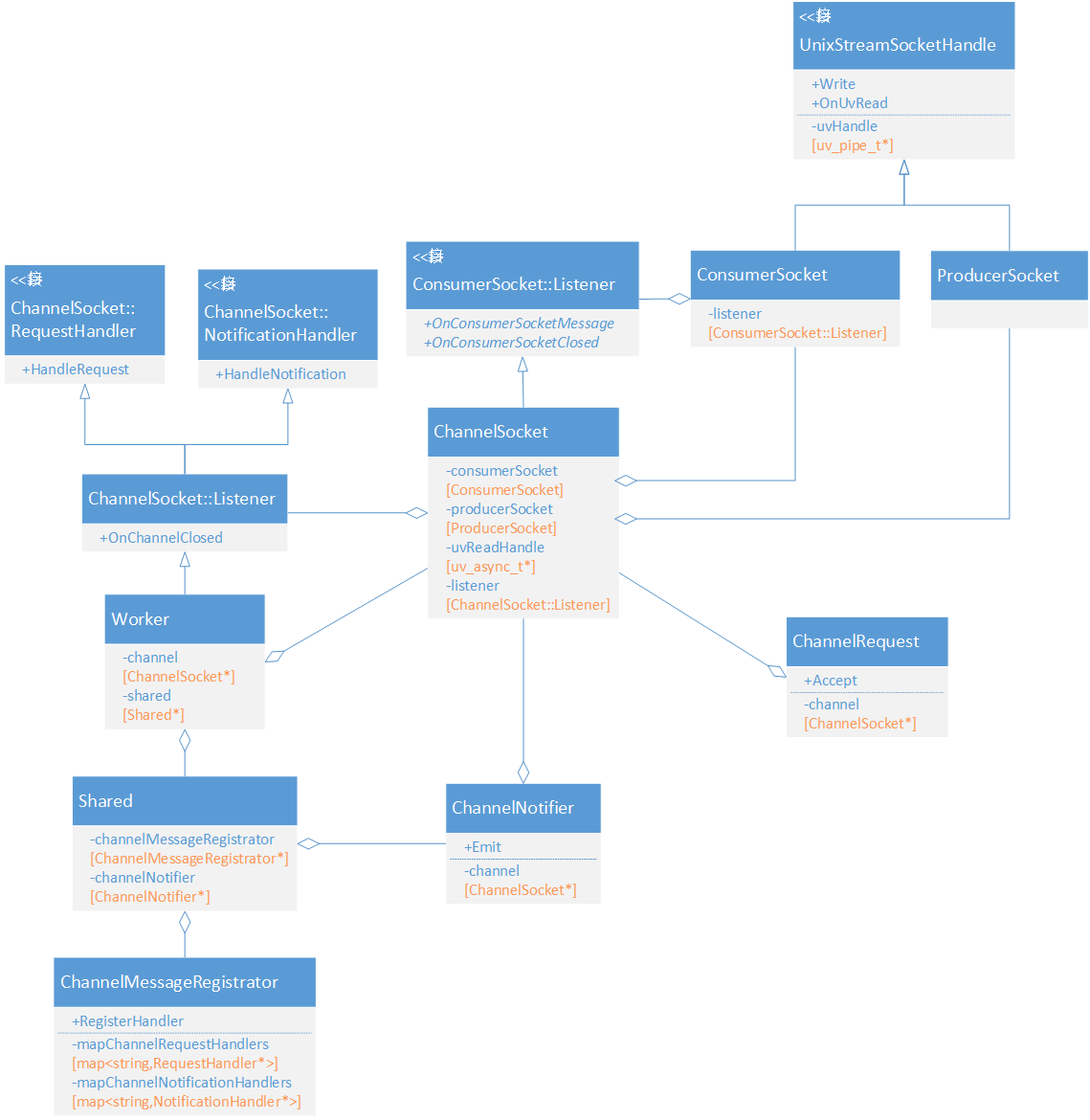
worker 进程对管道通信的封装看起来比较复杂,涉及到多个类,如下图所示。由于这里面糅合了几个逻辑,拆解以后会更好理解:
1)UnixStreamSocketHandle 封装了基于 libuv 的 pipe 通信能力,内部包含 libuv 句柄。
2)ChannelSocket 内部包含的 ConsumerSocket 和 ProducerSocket 对应管道通信的读和写两个方向。ChannelSocket 继承了 ConsumerSocket::Listener,从 ConsumerSocket 收到的管道消息,都会回调到 ChannelSocket。
3)全局只有一个 ChannelSocket 对象,被 Worker 持有。Worker 继承了 ChannelSocekt::Listener,ChannelSocket 收到的所有管道消息都会回调 Worker。
4)Worker 包含了一个 Shared 对象,从名字上能看出,这是一个“共享对象”,通过传参的方式共享给各个对象,本质上就是一个全局对象。
5)Shared 内部包含两个对象:ChannelMessageRegistor 和 ChannelNotifier。ChannelMessageRegistor 用来管理管道消息处理器,因为全局就一个 ChannelSocket 对象,所有需要处理管道消息的对象都要把自己注册到 ChannelMessageRegistor,Worker 根据注册信息把管道消息分发给各个处理器。ChannelNotifier 用来发送管道消息,其内部也是使用 ChannelSocket 来发送消息,所有对象需要向 Node.js 进程发送管道消息调用 ChannelNotifier 接口即可。
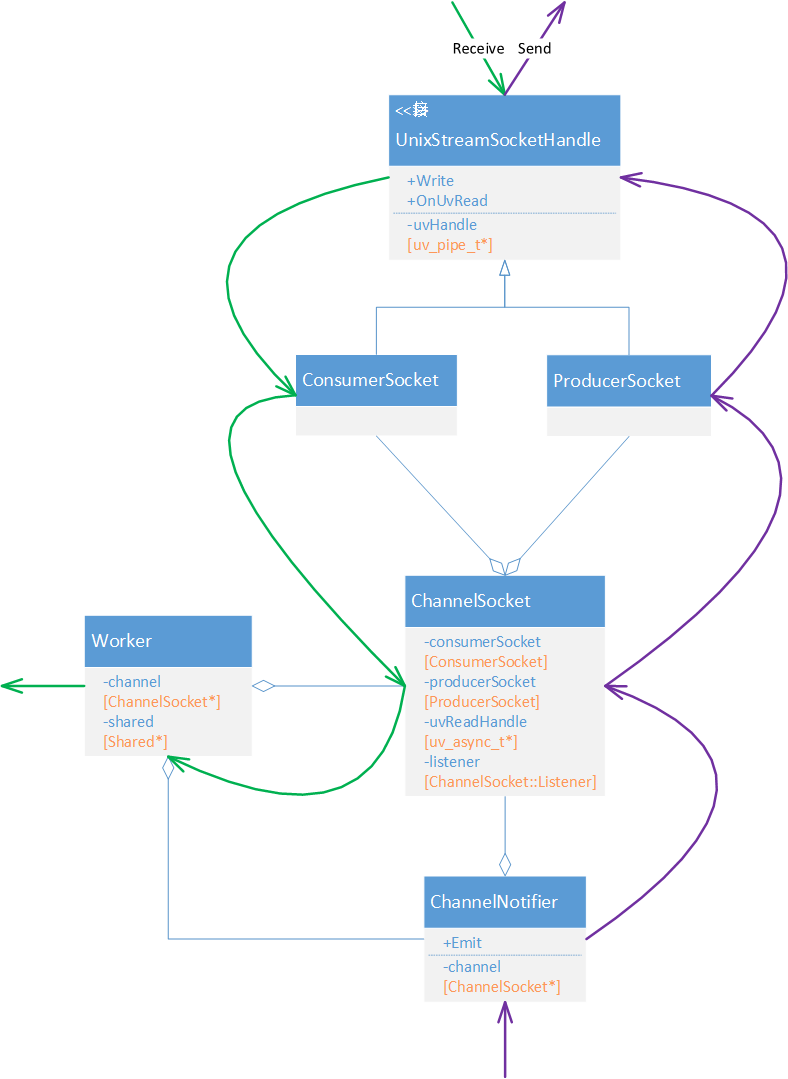
1.3. 数据流
管道通信的数据流如下图所示。接收到的管道消息会一层层回调到 Worker 对象,Worker 先对消息进行过滤,如果是 Worker 自己关注的消息,自己先处理,其他消息则根据“注册表”进行路由。发送管道消息,调用 ChannelNotifier::Emit 接口,最终通过 libuv 发送出去。
2. Socket 通信
Socket 通信主要用来处理 mediasoup worker 与 WebRTC 客户端之间的媒体通信,支持 TCP 和 UDP。
2.1. 静态结构
2.1.1. UDP
1)UdpSocketHandle 封装了基于 libuv 的 UDP 通信能力,内部包含 libuv 句柄。
2)UdpSocket 继承自 UdpSocketHandle,内部包含了一个数据监听对象,用来接收 UDP 消息。
2)PipeTransport、PlainTransport、WebRtcTransport 和 WebRtcServer 都支持 UDP 通信,它们内部都包含一个指向 UdpSocket 的指针,用来发送 UDP 消息。
【注】这里的 PipeTransport 并不是使用管道通信的 transport。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1898
1898

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









