









目录
红外接收模块VS1838B

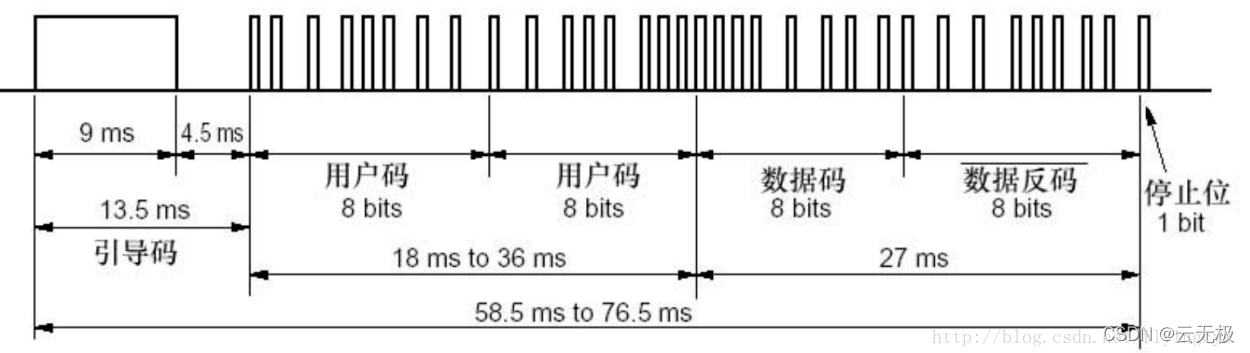
本次使用的红外模块为VS1838B,遥控器采用NEC编码协议,下面为遥控器键码表和NEC协议波形图

下面是测试过程中的一些数据,整理如下,方便理解NEC协议及编写代码


解码重点:
每两个连续的时间差代表一个bit位,如上图,两值相加大于2000微秒则为1,否则为0
下面为参考网上程序进行的采集程序封装为vs1838.py
import machine
import utime
import micropython
micropython.alloc_emergency_exception_buf(100)
class VS1838B:
def __init__(self, gpioNum):
self.gpioNum = gpioNum
#管脚初始化,并设置为上拉电阻
gpioNum.init(machine.Pin.IN, machine.Pin.PULL_UP)
#定义管脚出现电压变化时的回调函数,包含上升沿和下降沿
gpioNum.irq(
trigger=machine.Pin.IRQ_RISING | machine.Pin.IRQ_FALLING,
handler= self.__logHandler)
self.logList = [0 for x in range(1000)]
self.index = 0
self.start = 0
#所获得的遥控器键码
self.redCode = self.__loop()
#管脚发生变化时的回调函数
def __logHandler(self, source):
'''
由于采用的是上拉电阻,使得管脚默认为高电平状态
'''
thisComeInTime = utime.ticks_us()
#用于第一次发生管脚电压变化时的记录
if self.start ==0:
self.start = thisComeInTime
self.index = 0
return
#循环记录每次值
self.logList[self.index] = utime.ticks_diff(thisComeInTime, self.start)
self.start = thisComeInTime
self.index += 1
#如果连续不停的按下某按键会出现数量超过1000的现象,这里做下初始化处理
if self.index >= 1000:
self.logList = [0 for x in range(1000)]
self.index = 0
self.start = 0
#从获得的所有数据中拆出 数据码 和 数据反码
def getUsefulCode(self, timeList):
n=0
for i in timeList:
firstTimeTrue = (timeList[n] >= 8000) & (timeList[n]<= 10000)
seconTimeTrue = (timeList[n+1] >= 4000) & (timeList[n+1]<= 5000)
if firstTimeTrue & seconTimeTrue:
return timeList[n+34: n+65]
n += 1
#将数据码转换为整数数组,高电平为1,低电平为0,注意这里的顺序与实际正好相反,所有从后往前进行解码
def getBinCode(self, usefulCode):
n=15
binCodeList =[]
for i in usefulCode:
if (usefulCode[n]+usefulCode[n-1])>2000:
binCodeList.append(1)
else:
binCodeList.append(0)
n-=2
if n<0:
return binCodeList
def __loop(self):
while True:
utime.sleep_ms(200)
if utime.ticks_diff(
utime.ticks_us(),
self.start) > 800000 and self.index > 0:
thisIRcodeList = []
n = 0
for i in self.logList:
#当被赋值的数据列表中有连续6个0时,则提取这6个0之前的数据作为全部数据
if (self.logList[n] == 0) and (self.logList[n +
1] == 0) and (self.logList[n +
2] == 0) and (self.logList[n +
3] == 0) and (self.logList[n +
4] == 0) and (self.logList[n +
5] == 0):
#获得的所有数据
print(thisIRcodeList)
print(str(len(thisIRcodeList)))
#从所有数据中拆分出有效数据码,同样也可以拆分出数据反码进行校验,这里省略
usefulCode= self.getUsefulCode(thisIRcodeList)
#print(usefulCode)
#获取二进制整数数组
binCode = self.getBinCode(usefulCode)
#print(binCode)
#把二进制整数数组转为10进制
toInt = int("".join(map(str, binCode)),2)
toInt = hex(toInt)
#print(toInt)
#返回键码前,把数据进行初始化,否则下次解析时会出错
self.logList = [0 for x in range(1000)]
self.index = 0
self.start = 0
return toInt
else:
thisIRcodeList.append(i)
n += 1在主函数main.py中进行调用
#红外接收,并用遥控器的1键开灯,2键关灯
from red1838 import VS1838B
gpioNum = Pin(5)
p2 = Pin(2, Pin.OUT)
while True:
try:
print("红外接收键码")
getcode = VS1838B(gpioNum=gpioNum) #红外模块未收到数据时会停留在这里
codeValue = getcode.redCode
print(codeValue)
if str(codeValue) == "0x45":
p2.off() #Open led
if str(codeValue) == "0x46":
p2.on() #Close led
except:
pass















 2553
2553











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









