







Blob在机器视觉中是指图像中的具有相似颜色、纹理等特征所组成的一块连通区域。Blob分析就是对这一块连通区域进行几何分析得到一些重要的几何特征,例如:区域的面积、中心点坐标、质心坐标、最小外接矩形、主轴等。
Blob分析的一般步骤:
(1)图像分割:分离出前景和背景
(2)连通性分析:根据目标的连通性对目标区域进行标记,或者叫拓扑性分析
(3)特征量计算:描述了区域的几何特征,这些几何特征不依赖与灰度值
一个很简单的例子:
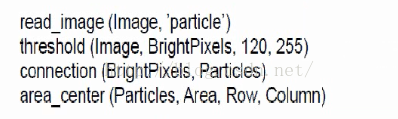
1.图像分割
将图像分离为目标像素和背景像素,初始分割之后一般需要进行形态学处理才能满足使用要求。常用分割方法:直接输入;硬阈值分割;软阈值分割。常用形态学处理包括:连通、膨胀、腐蚀、开操作、闭操作、顶帽变换、击中与不击中变换、交集、差异、骨架、边界等。
阈值分割又包括:
1)简单阈值分割threshold
适用范围:目标与背景之间存在灰度差(如果环境稳定,阈值可以在离线状态下一次确定)
2)动态阈值分割dyn_threshold
适用范围:背景不均一无法确定全局阈值、目标经常表现为比背景局部亮一些或者暗一些。这时候需要通过其领域来找到一个合适的阈值进行分割。确定其领域的方法是:通过一些平滑滤波算子来确定领域,例如mean_image或者binomial_filter
3)自动全局阈值方法bin_threshold
4)watersheds_threshold
2.特征量计算常用
area_center,区域面积Area和中心(Row,Column)
area_center_gray,区域面积Area和灰度中心(Row,Column)
smallest_rectangle1最小外接矩形
smallest_rectangle2最小外接仿射矩形,
compactness,紧凑度
elliptic_axis,计算region区域中的椭圆参数
intensity,计算region区域的灰度平均值和偏差
min_max_gray,最小最大灰度值

















 2965
2965

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









