







1 准备
(1)树莓派OS
树莓派:Raspberry pi-4b 4G内存 32bit - Raspberry Pi OS lite版本
IMU芯片:BMI160
(2)树莓派与BMI160接线
BMI160端的接线参考:BMI160 datasheet,下面是我的4线接法:

对于树莓派端(我的接法):

在淘宝上的采购的BMI160小板子,下图是和40PIN树莓派的接线图:

(3)安装wiringPi
参考我写的这篇文章:https://blog.csdn.net/zhoulr000/article/details/121191981
(4)安装CMake 【非必须, 因为我的源码使用了CMake】
参考我写的这篇文章:https://editor.csdn.net/md/?articleId=120693506
2 确认SPI是否开启
(1)使用下面2个指令可以查看spi是否开启
ls -al /dev | grep spi
lsmod | grep spi
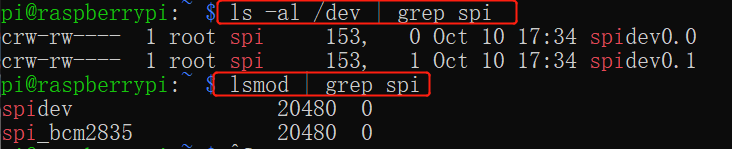
如果没有,上面截图的信息,说明SPI没有打开,请参考下面的博客打开SPI:
https://blog.csdn.net/qq_34163820/article/details/52902567
(2)spi的编程参考:http://hugozhu.myalert.info/2013/04/05/25-get-spi-working-on-raspberry-pi-spi.html
3 通过SPI读取IMU数据
下面是demo程序的主程序:
/*
*
*/
#include <stdint.h>
#include <stdio.h>
#include <sys/time.h>
#include <math.h>
#include "drv_pi_bmi160.h"
#include "wiringPi.h"
#include "wiringPiSPI.h"
/***
struct timeval{
long tv_sec; //秒
long tv_usec; //微秒
};
*/
double my_norm(double *x) {return sqrt(x[0]*x[0] + x[1]*x[1] + x[2]*x[2]);}
void main(void)
{
int i;
struct timeval tv = {0,0};
int16_t imu_stream_data[7];
double imu_data[7];
/**/
if (-1 == wiringPiSetup())
{
printf("initial wiringPi lib failed!\n");
return;
}
if (bmi160_init())
{
printf("initial bmi160 falied\n");
return;
}
delay(10);
while(1)
{
/* 读时间戳 */
gettimeofday(&tv, NULL);
/* 从BMI160读取加速度计和陀螺原始数据 */
bmi160_read_imudata(imu_stream_data);
/* 原始数据转换成正常单位, 加速度计(g)-- 陀螺(rad/s)*/
scale_proc_imudata(imu_stream_data, imu_data);
/* 打印测试 */
printf("%15.6lf %12.6lf %12.6lf %10.6lf %12.6lf %12.6lf %12.6lf %6.2f norm=%lf\n", tv.tv_sec + tv.tv_usec * 1e-6,
imu_data[0],imu_data[1],imu_data[2],
imu_data[3],imu_data[4],imu_data[5],imu_data[6],
my_norm(&imu_data[3]));
delay(100); // 调整sleep时间,控制读取数据的频率
//usleep(100000);
}
}
测试结果:

完整的代码从这里获取:https://download.csdn.net/download/zhoulr000/40143004
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









