







自动驾驶越来越离不开高精地图和高精GPS
本文把已知的GPS总结如下:
1. GPS原理 2.差分GPS原理 3.组合惯导原理 4.opendrive格式解析 5.地图匹配算法 6.导航全局规划(A*算法)
1. GPS原理
GPS的全称是全球定位系统(the Global Positioning System)。它属于美国政府,并由洛杉矶的联合项目办公室(JPO, Joint Program Office)管理。
三维空间,已知三个点的坐标位置,并且知道这三个点到未知点的距离[r1,r2,r3r1,r2,r3],那么就可以有三个方程,用来解三个未知数[(x,y,z)(x,y,z)],
按理说更多的卫星都满足这个方程,是唯一解,但是信号在传输个过程中受到电离层、墙面反射、多径效应等干扰,求出来的就不是精确解了,我们只能用多个卫星信号求模糊解。
2.差分GPS原理
GPS信号有很多误差,如果知道这些误差,不就可以求出唯一解(正确的GPS位置),基准站正是为此准备的,
基准站提前计算出每个卫星到本地的误差,并把这个误差发给附近的GPS设备,用它来矫正GPS和每个卫星的误差,从而计算出当前的GPS位置,当然,这些误差也不是相同的,离基准站越近越准。一般用于100KM之内。
载波相位差分技术又称为RTK技术,是另一种差分技术。
3.组合惯导原理
GPS/INS组合导航系统由全球卫星导航系统(GPS)、惯性导航系统(INS)和信息处理系统三部分构成。
惯性导航系统 一般是3轴加速度传感器,采用加速度传感器和角度做状态估计,GPS信号做观测,
利用kalman filter 计算实时GPS位置。
近年来还有融合北斗系统的组合惯导。
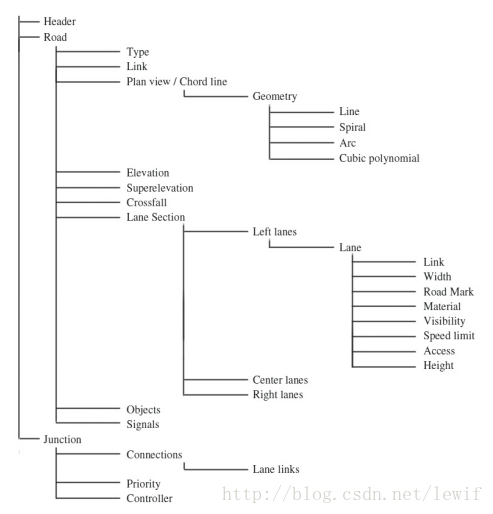
4.opendrive格式解析
OpenDrive地图文件格式为xml,详细的介绍可以参考
http://www.opendrive.org/docs/OpenDRIVEFormatSpecRev1.4H.pdf
该xml文件中中包含了很多地图信息,例如Road、Junction等,下图是xml文件的主要结构,
在OpenDRIVE坐标采用轨迹坐标系:

reference line是路网结构中一个很重要的概念,绘制地图的时候先是画reference line,reference line包含xy位置坐标、路的形状属性,然后在reference line基础上再去画其他其他元素。
算了 不粘贴了:https://blog.csdn.net/lewif/article/details/78575840
5.地图匹配算法
所谓地图匹配算法,是指通过当前的GPS坐标,和高精地图信息,分析出车辆所在的位置,你可能好奇知道坐标还要分析什么?
1.gps有误差,2,地图有误差。很难准确得到结果。
百度地图做法如下:
路网中附近有N条link,分析当前车辆在哪条link上,具体在哪条LINK上由以下部分决定:
1 gps点到每一link的距离。
2 gps方向与每一link夹角cos值。
3 gps历史link和每一link的拓扑关系:当前link为1,相连link为0.5,不相连为0
4 gps轨迹和每一link的形状相似度
以上所有link权重相加,最终得到权重最大的link
特别的:
1. 百度地图训练了3组参数(以上4部分的权重),分别对应城市 乡村 复杂立交等不同场景。
2. 加入错误检测机制,当匹配的link距离超过阈值,则剔除拓扑关系和轨迹相似度两部分,重新计算新的link
6.导航全局规划(A*算法)
A*算法一般用于导航路劲规划中。
A*算法的思想是这样的:
-
每个节点记录三个数据,G:离开点的步数、H:和终点的距离估算、F=G+H
同时还应该有一个P,记录其父节点,一遍能够找到路径 -
两个集合,接壤集合,和已走结合
同时还有一个集合是没有走的,但是这个集合并不会显式的写出来。 -
从起点开始计算与起点接壤的节点的GHF值,然后放入接壤集合
这里计算完了,需要将起始节点放入已走节点集合,否则会重复计算两次。
同时需要处理p的值 -
从接壤集合中取出F值最小的节点,计算与该节点接壤的节点GHF值,放入接壤结合,然后将该节点放入已走节点
这里,如果一个节点已经计算过了,或者在已走节点中,那就不要算了。
如果一个节点已经计算过,那么表明该节点以前的F值比再次计算出来的F值要小。 -
重复步骤4,直到到达终点
启发函数一般推荐如下:
- 如果图形中只允许朝上下左右四个方向移动,则可以使用曼哈顿距离(Manhattan distance)。
- 如果图形中允许朝八个方向移动,则可以使用对角距离。
- 如果图形中允许朝任何方向移动,则可以使用欧几里得距离(Euclidean distance)。
A* c++代码:https://blog.csdn.net/A_L_A_N/article/details/81392212
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









