







参考:STM32F103五分钟入门系列(十三)独立看门狗IWDG
作者:自信且爱笑‘
发布时间:2021-07-31 19:50:28
网址:https://blog.csdn.net/Curnane0_0/article/details/119269391?utm_source=app&app_version=4.12.0&code=app_1562916241&uLinkId=usr1mkqgl919blen
参考:STM32 独立看门狗实验
作者:追兮兮
发布时间: 2020-12-25 10:14:21
网址:https://blog.csdn.net/weixin_44234294/article/details/111661281
学习板:STM32F103ZET6
一、独立看门狗(IWDG)简介
1、什么是看门狗
STM32 的独立看门狗由内部专门的 40Khz 低速时钟驱动,即使主时钟发生故障,它也仍然有效。这里需要注意独立看门狗的时钟是一个内部 RC 时钟,所以并不是准确的 40Khz,而是在 30~60Khz 之间的一个可变化的时钟,只是我们在估算的时候,以 40Khz 的频率来计算,看门狗对时间的要求不是很精确,所以,时钟有些偏差,都是可以接受的。
首先我们得讲解一下看门狗的原理。这个百度百科里面有很详细的解释。我们总结一下:单片机系统在外界的干扰下会出现程序跑飞的现象导致出现死循环,看门狗电路就是为了避免这种情况的发生。看门狗的作用就是在一定时间内(通过定时计数器实现)没有接收喂狗信号(表示 MCU 已经挂了),便实现处理器的自动复位重启(发送复位信号)。
总结:看门狗是为了避免程序跑飞而设置的,在程序正常运行情况下,会一直“喂狗”,使程序不会复位。可以这样理解:在一个定时器中断中,中断服务函数里是整个程序的复位,在定时器之外,会一直给定时器重装载初值(相当于喂狗),程序一直执行正常的话,定时器不会发生中断,即不会进入中断服务函数,不会执行复位程序;当程序跑飞时,由于没有“喂狗”,定时器计数到0(如向下计数时),发生中断,执行中断服务函数里的复位程序,程序重新开始执行。
2、独立看门狗应用场合
由于独立看门狗时钟源由LSI时钟提供,并不精确,所以IWDG最适合应用于那些需要看门狗作为一个在主程序之外,能够完全独立工作,并且对时间精度要求较低的场合。
二、独立看门狗时钟
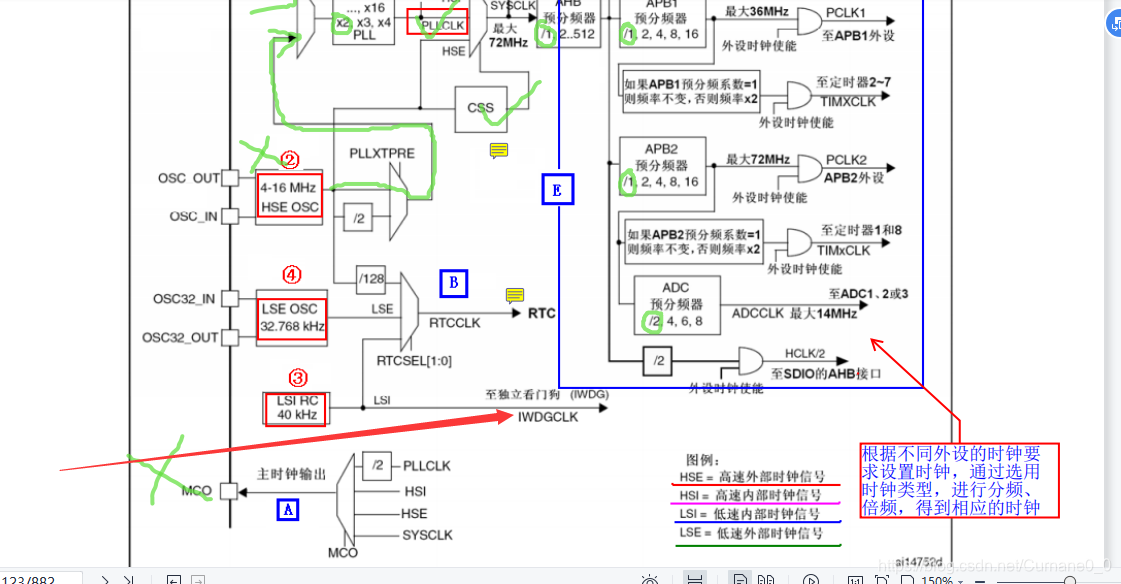
从时钟框图可以看到,看门狗的时钟为内部低速时钟40KHZ,我们知道LSI和HSI都是有内部RC振荡电路生成的,输出不稳定,所以这个时钟大约为40KHZ,并不精准。
三、独立看门狗的相关寄存器
(1)键寄存器(IWDG_KR)
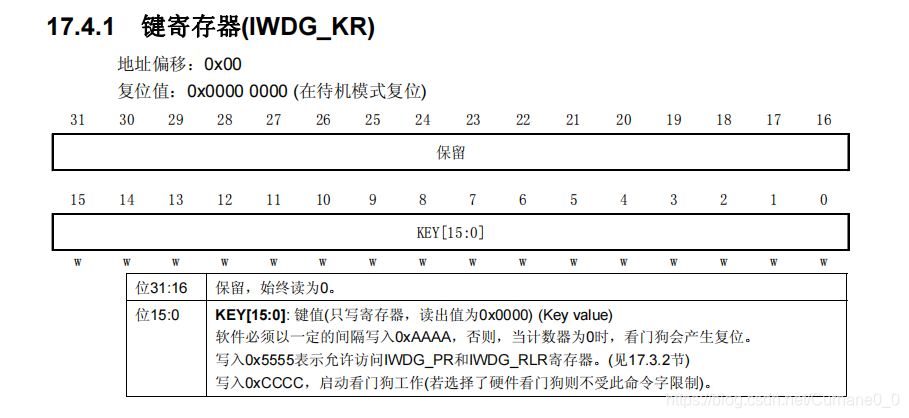
该寄存器是低16位有效的32位寄存器。从上图得到以下信息:
①IWDR_KR寄存器是只写寄存器
②IWDR_KR写入0XAAAA,才算“喂狗”,且一定时间间隔必须写入,否则程序复位
③IWDR_KR写入0X5555表示允许访问IWDG_PR和IWDG_RLR寄存器,未写入时这两个寄存器处于保护状态,无法进行写操作
④IWDR_KR写入0XCCCC,启动看门狗
所以一般程序可以如下:
IWDG->KR=0x5555;//取消IWDG_PR和IWDG_RLR寄存器保护
IWDG->PR= //设置这俩个寄存器
IWDG->RLR=
IWDG->KR=0xAAAA;//开始时给重装载寄存器装载初值
IWDG->KR=0xCCCC;//启动看门狗
//程序中喂狗(程序其它地方)
IWDG->KR=0xAAAA;//喂狗
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
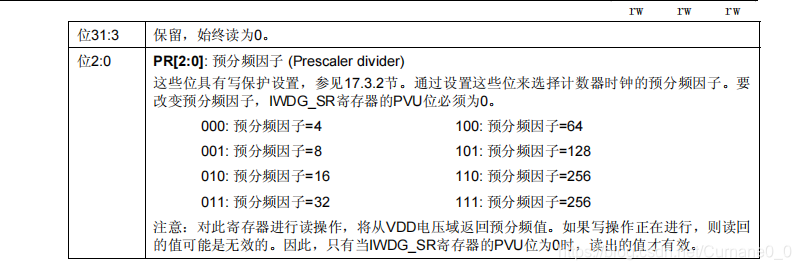
(2)预分频寄存器(IWDG_PR)
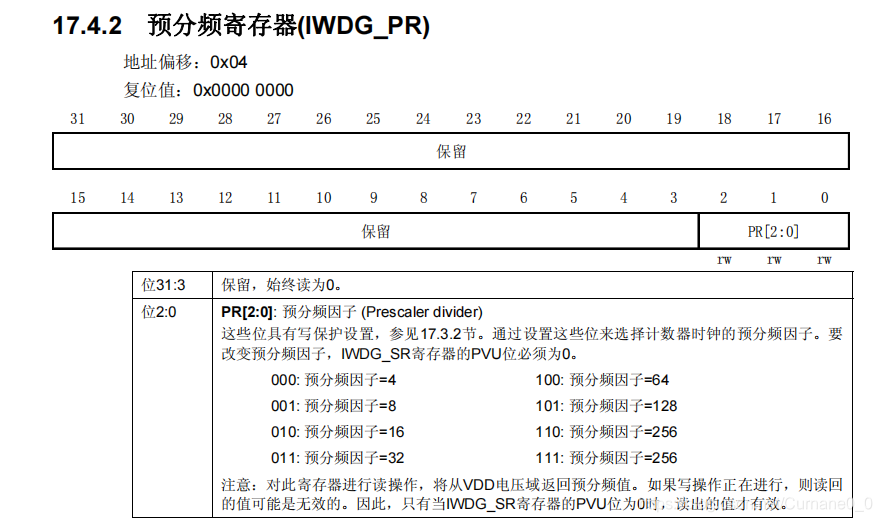
该寄存器是只有低3位有效的32位寄存器,之前的IWDG_KR寄存器中也强调过,要对IWDG_PR寄存器操作,必须先对IWDG_KR写入0x5555。
我们知道,独立看门狗的时钟是40KHZ的LSI,经过本寄存器设置预分频系数后,独立看门狗的时钟会变为40KHZ/预分频因子。
(3)重装载寄存器(IWDG_RLR)
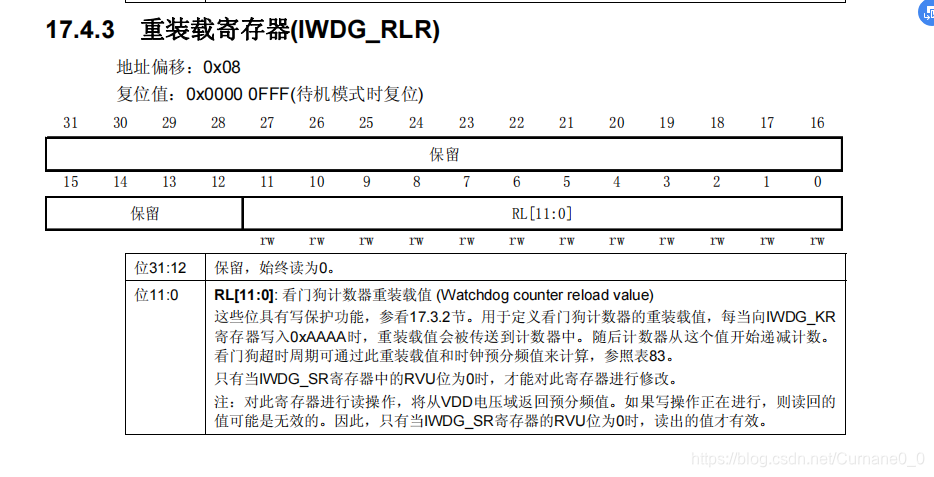
该寄存器并不像SysTick定时器的重装载寄存器一样,该寄存器不需要手动装载初值,只需设置好装载值后,每次给IWDG_KR寄存器写入0xAAAA,即可装载初值。
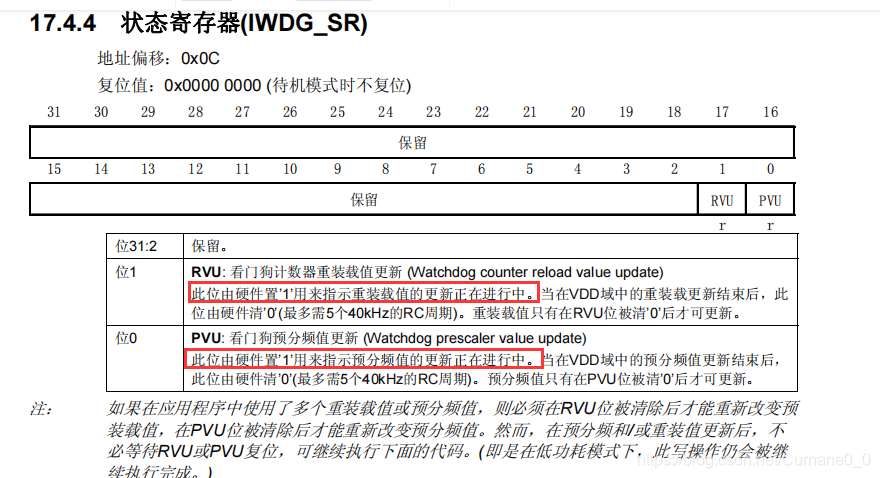
(4)状态寄存器(IWDG_SR)

该寄存器只有位0和位1有效,位0指示预分频值更新、位1指示重装载值更新;置1时表示正在更新,置0时表示更新完成。
通过该寄存器还可以获取目前看门狗装载值、预分频器更新状态:
while(IWDG->SR|0x00000002)
{
}//重装载值更新中
f(!(IWDG->SR|0x00000002))
{
}//重装载值更新完成
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
四、独立看门狗编程顺序
①取消寄存器写保护(向 IWDG_KR 写入 0X5555)
②设置独立看门狗的预分频系数和重装载值(IWDG_PR和IWDG_PLR)
③重载计数值喂狗(向 IWDG_KR 写入 0XAAAA)
④启动看门狗(向 IWDG_KR 写入 0XCCCC)
⑤程序的其他地方喂狗(向 IWDG_KR 写入 0XAAAA)
五、例子(寄存器版)
例:按下KEY_UP后,喂狗,正常状态下,LED0处于亮灯状态。(当没有喂狗时,程序被复位,此时LED0会灭了再被点亮)
LED和KEY的代码之前总结过了,可以详见:STM32F103五分钟入门系列(五)按键实验(库函数+寄存器)
这里直接附代码:
//led.h
#ifndef LED_H
#define LED_H
void LED_Init(void);
#endif
- 1
- 2
- 3
- 4
- 5
- 6
//led.c
#include "sys.h"
#include "stm32f10x.h"
#include "led.h"
void LED_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct_B;
GPIO_InitTypeDef GPIO_InitStruct_E;
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOB|RCC_APB2Periph_GPIOE ,ENABLE);
GPIO_InitStruct_B.GPIO_Mode=GPIO_Mode_Out_PP;
GPIO_InitStruct_B.GPIO_Pin=GPIO_Pin_5;
GPIO_InitStruct_B.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStruct_B);
GPIO_InitStruct_E.GPIO_Mode=GPIO_Mode_Out_PP;
GPIO_InitStruct_E.GPIO_Pin=GPIO_Pin_5;
GPIO_InitStruct_E.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOE,&GPIO_InitStruct_E);
GPIO_SetBits(GPIOB, GPIO_Pin_5);//PB5置高电平
//GPIO_WriteBit(GPIOB, GPIO_Pin_5,1);
//GPIO_Write(GPIOB,0x0020); //慎用
//PBout(5)=1;
GPIO_SetBits(GPIOE, GPIO_Pin_5);//PE5置高电平
//GPIO_WriteBit(GPIOE, GPIO_Pin_5,1);
//GPIO_Write(GPIOE,0x0020); //慎用
//PEout(5)=1;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
//key.h
#ifndef KEY_H
#define KEY_H
void KEY_Init(void);
#endif
- 1
- 2
- 3
- 4
- 5
//key.c
#include "stm32f10x.h"
#include "sys.h"
#include "key.h"
void KEY_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct_A;
GPIO_InitTypeDef GPIO_InitStruct_E;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOE , ENABLE);//使能GPIOA和GPIOE(PA0 PE2、3、4)
GPIO_InitStruct_A.GPIO_Mode=GPIO_Mode_IPD;
GPIO_InitStruct_A.GPIO_Pin=GPIO_Pin_0 ;
GPIO_InitStruct_A.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStruct_A);//PA0 key_up 下拉输入
GPIO_InitStruct_E.GPIO_Mode=GPIO_Mode_IPU;
GPIO_InitStruct_E.GPIO_Pin=GPIO_Pin_2|GPIO_Pin_3|GPIO_Pin_4;
GPIO_InitStruct_E.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOE, &GPIO_InitStruct_E);//PE2、3、4 key0、key1、key2 上拉输入
GPIO_SetBits(GPIOE,GPIO_Pin_2|GPIO_Pin_3|GPIO_Pin_4);
GPIO_ResetBits(GPIOA, GPIO_Pin_0);
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
接下来写独立看门狗实验,寄存器版比较简单
首先看一下预分频系数和重装载值怎么搞。
LSI约为40KHZ,就当它是准确的40KHZ,预分频系数为4、8、16…
如预分频系数为16时,设置1s内喂狗。
则独立看门狗时钟为40kHZ/16,,每计数一次的时间:16/40ms,则1s需要计数:40000/16=2500;所以可以设置:
分频系数为16,即IWDG_PR寄存器的值为010,即0x02
重装载初值为2500,即IWDG_RLR寄存器的值为:2500
需要注意的是,重装载值寄存器IWDG_RLR只有低12位有效,所以最大重装载值为:2^12-1=4095
mian.c中代码:
//main.c
#include "stm32f10x.h"
#include "led.h"
#include "key.h"
#include "sys.h"
#include "delay.h"
int main(void)
{
KEY_Init();
LED_Init();
delay_init();
delay_ms(500);//为了看到程序复位
PBout(5)=0;//点亮LED0
IWDG->KR=0x5555;//取消IWDG_PR和IWDG_RLR寄存器保护
IWDG->PR=0x02;
IWDG->RLR=2500;//设置分频系数和重装载值
//正常操作应该是先位与运算清空寄存器,再位或运算赋值
IWDG->KR=0xAAAA;//初始状态下,装载初值
IWDG->KR=0xCCCC;//启动看门狗
while(1)
{
if(GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_0))//检测key_up按下
{
IWDG->KR=0xAAAA;//喂狗
}
}
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
上述程序需要注意的是一定要延时一个时间,否则没有喂狗导致程序重新执行,但是LED灭一下,根本看不出变化。
通过上述代码,下载调试后发现:在KEY_UP未按下时,LED0每亮1s,灭0.5s,当长按KEY_UP时,LED0保持常亮状态。
六、独立看门狗常用库函数
独立看门狗的常用库函数定义在stm32f10x_iwdg.h中:
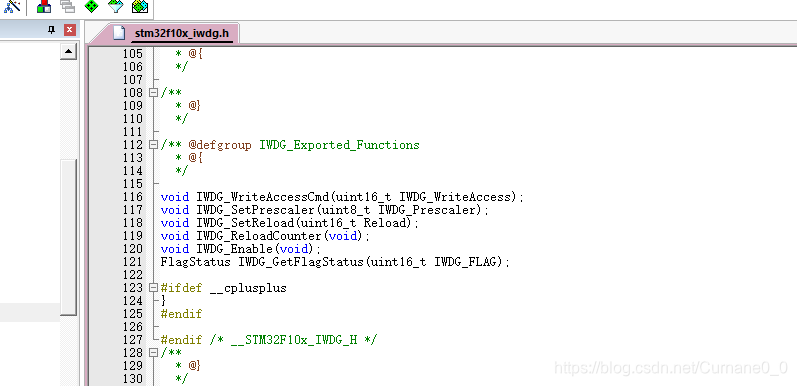
(1)取消PR、RLR寄存器写保护函数IWDG_WriteAccessCmd()
参数:
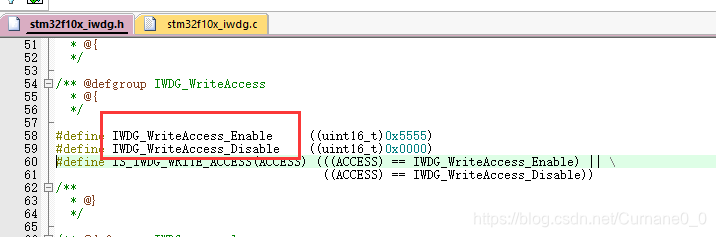
操作:
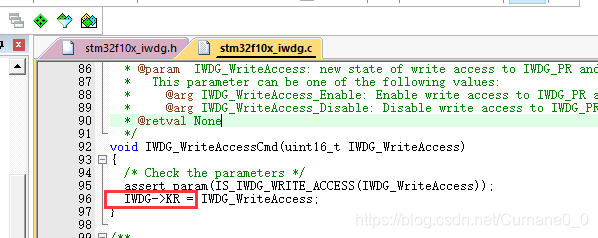
可以看到该函数就是将KR写入0x5555,来取消PR、RLR寄存器写保护
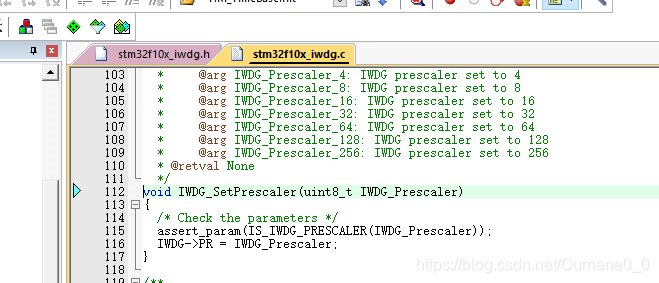
(2)设置分频因子函数IWDG_SetPrescaler()
参数:
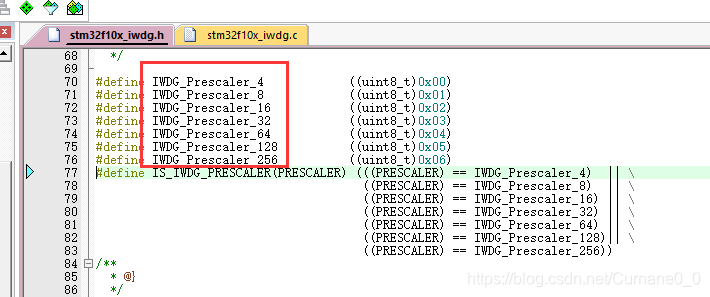
操作:
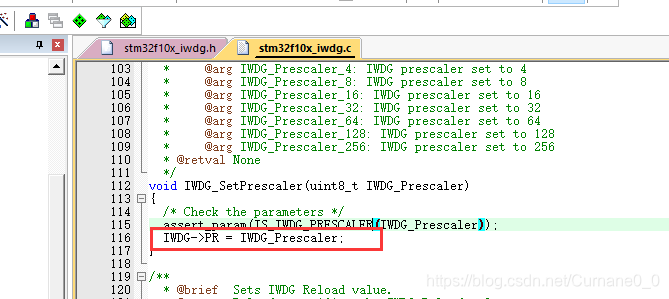
可以看到,该函数是将16进制数写入PR寄存器,其分频因子对应的16进制数:
(3)设置重装载值函数IWDG_SetReload()
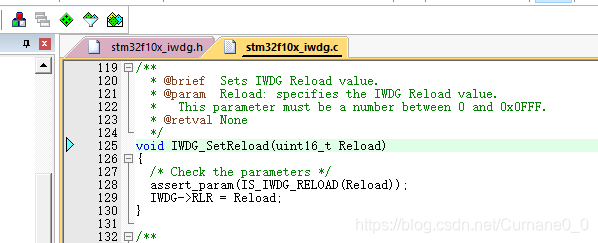
参数:
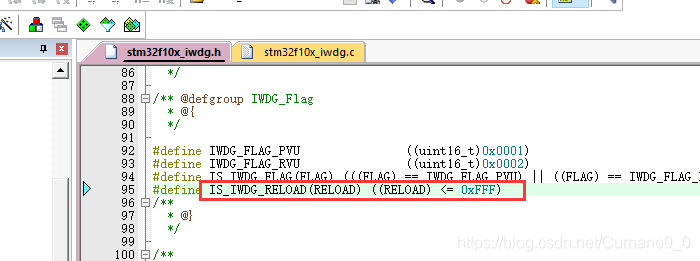
该参数由我们计算得来,由于RLR寄存器是低12位有效,所以该值<=0xFFF
操作:
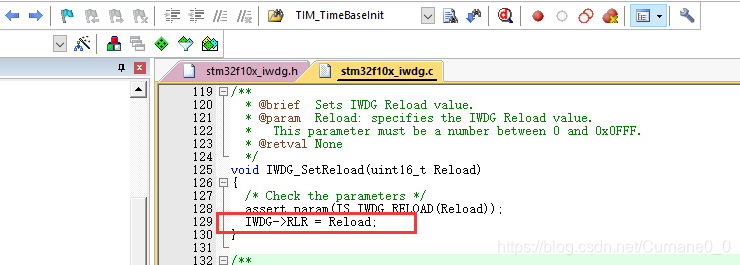
直接将重装载初值写入到RLR寄存器
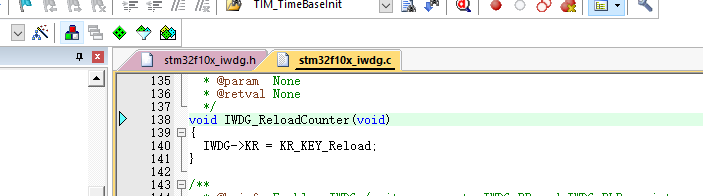
(4)重装载初值函数(喂狗)IWDG_ReloadCounter
参数:
无
操作:
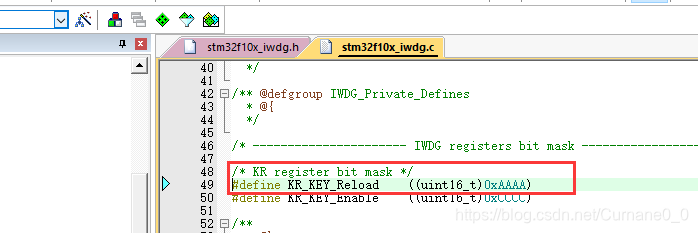
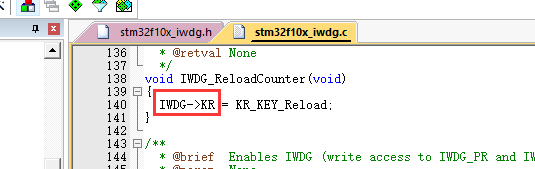
直接对KR寄存器写入0xAAAA,喂狗。
(5)启动独立看门狗函数IWDG_Enable()
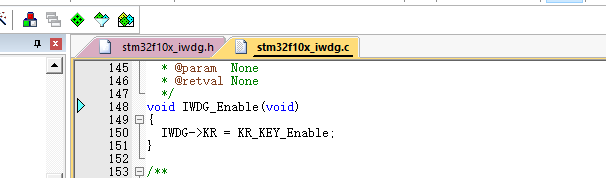
参数:
无
操作:
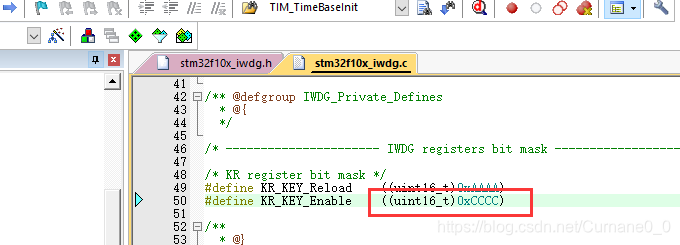
给KR寄存器写入0xCCCC,启动独立看门狗。
(6)独立看门狗状态获取函数IWDG_GetFlagStatus()
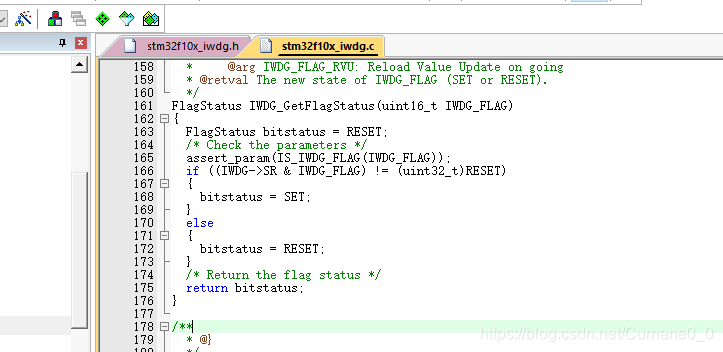
参数:
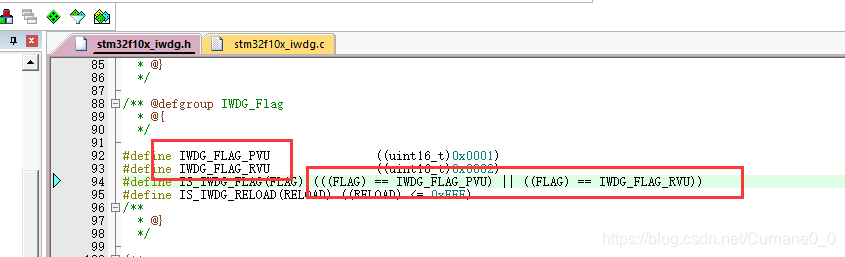
参数FLAG=0x0001|0x0002=0x0003
当独立看门狗处于更新状态时:(IWDG->SR & IWDG_FLAG) != (uint32_t)RESET,返回SET,表示正在更新,否则不在更新状态。
操作:
直接获取SR寄存器位0和位1的值
返回值:
返回SET(!0)表示处于更新中
返回RESET(0)表示不在更新中
七、例子(库函数版)
库函数版也比较简单,直接把刚刚例子中寄存器部分替换为库函数
代码如下:
//mian.c
#include "stm32f10x.h"
#include "led.h"
#include "key.h"
#include "sys.h"
#include "delay.h"
int main(void)
{
KEY_Init();
LED_Init();
delay_init();
delay_ms(500);//为了看到程序复位
PBout(5)=0;//点亮LED0
//IWDG->KR=0x5555;//取消IWDG_PR和IWDG_RLR寄存器保护
IWDG_WriteAccessCmd(IWDG_WriteAccess_Enable);
//IWDG->PR=0x02;//设置重装载值
IWDG_SetPrescaler(IWDG_Prescaler_16);
//IWDG->RLR=2500;//设置分频系数和重装载值
IWDG_SetReload(2500);//设置分频系数和重装载值
//正常操作应该是先位与运算清空寄存器,再位或运算赋值
//IWDG->KR=0xAAAA;//初始状态下,装载初值
IWDG_ReloadCounter();
//IWDG->KR=0xCCCC;//启动看门狗
IWDG_Enable();
while(1)
{
if(GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_0))//检测key_up按下
{
//IWDG->KR=0xAAAA;//喂狗
IWDG_ReloadCounter();
}
}
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39














 846
846











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









