







1.Android坐标系
在Android中,将屏幕的最左上角顶点作为Android坐标系的原点
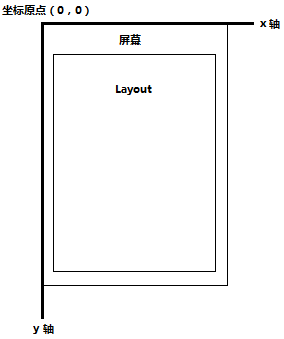
从原点向右是X轴的正方向,从原点向下是Y轴的正方向
View提供了getLocationOnScreen( int[] location)方法来获取在整个屏幕内的绝对坐标,该坐标值为View左上角的坐标。注意该View的坐标值是从屏幕左上角开始获取的,所以也包括了通知栏的高度
该方法的具体实现
/**
* <p>Computes the coordinates of this view on the screen. The argument
* must be an array of two integers. After the method returns, the array
* contains the x and y location in that order.</p>
*
* @param location an array of two integers in which to hold the coordinates
*/
public void getLocationOnScreen(@Size(2) int[] location) {
getLocationInWindow(location);
final AttachInfo info = mAttachInfo;
if (info != null) {
location[0] += info.mWindowLeft;
location[1] += info.mWindowTop;
}
}可看到,传入的int[]数组中,location[0]代表的是X轴坐标,location[1]代表的Y轴坐标
这里还有个getLocationInWindow方法,作用是获取View在当前窗口内的绝对坐标
我们在通过MotionEvent类中的getRawX(),getRawY()方法获取的坐标同样也属于这种Android坐标系里的坐标
2.视图坐标系
Android中的视图坐标系,描述的是子视图与其父视图中的位置关系
和Android坐标系一样,视图坐标系也是以原点向右为X轴正方向,以原点向下为Y轴正方向,与Android坐标系不同的是,视图坐标系的原点是以父视图左上角的位置为原点
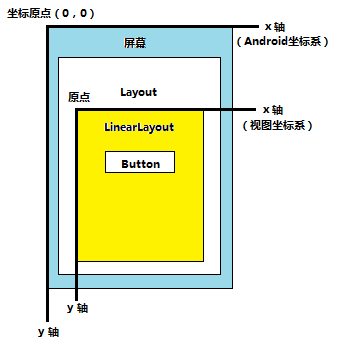
如上图中,对于Button来说,父视图LinearLayout左上角就是视图坐标系的原点(0,0)
我们通过MotionEvent类中的getX()、getY()方法所获得的就是视图坐标系的坐标
在Android中,系统提供了很多获取坐标值、相对距离等方法
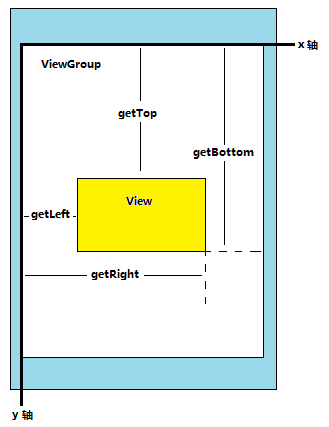
View提供的API
- getTop():获取View顶边到其父布局顶边的距离
- getLeft():获取View左边到其父布局左边的距离
- getRight():获取View右边到其父布局左边的距离
- getBottom():获取View底边到其父布局顶边的距离
MotionEvent提供的API
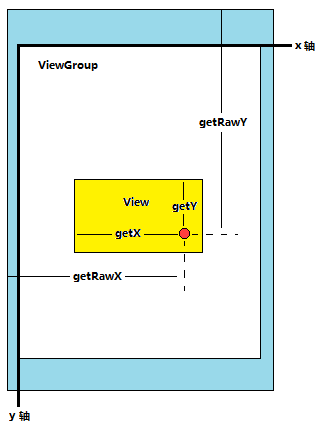
- getX():获取点击位置离View左边的距离
- getY():获取点击位置离View顶边的距离
- getRawX():获取点击位置离屏幕左边的距离
- getRawY():获取点击位置离屏幕顶边的距离

















 472
472

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









