







bilateral filter双边滤波器的通俗理解
图像去噪的方法很多,如中值滤波,高斯滤波,维纳滤波等等。但这些降噪方法容易模糊图片的边缘细节,对于高频细节的保护效果并不明显。相比较而言,bilateral filter双边滤波器可以很好的边缘保护,即可以在去噪的同时,保护图像的边缘特性。双边滤波(Bilateral filter)是一种非线性的滤波方法,是结合图像的空间邻近度和像素值相似度的一种折衷处理,同时考虑空域信息和灰度相似性,达到保边去噪的目的(不理解这几个概念没关系,后面会慢慢解释)。
1. 双边滤波(Bilateral filter)的原理
双边滤波器之所以能够做到在平滑去噪的同时还能够很好的保存边缘(Edge Preserve),是由于其滤波器的核由两个函数生成:空间域核和值域核
- (1)空间域核:由像素位置欧式距离决定的模板权值


 为模板窗口的其他系数的坐标;其中
为模板窗口的其他系数的坐标;其中 为模板窗口的中心坐标点;
为模板窗口的中心坐标点;
 为高斯函数的标准差。 使用该公式生成的滤波器模板和高斯滤波器使用的模板是没有区别的。
为高斯函数的标准差。 使用该公式生成的滤波器模板和高斯滤波器使用的模板是没有区别的。
在一些博客和教程里,这个权值
空间域(spatial domain S)。显示由到中心点
临近程度,因此定义域核
- (2)值域核:由像素值的差值决定的模板权值


其中,为模板窗口的其他系数的坐标, 表示图像在点处的像素值;为模板窗口的中心坐标点,对应的像素值为
表示图像在点处的像素值;为模板窗口的中心坐标点,对应的像素值为 ;
; 为高斯函数的标准差。
为高斯函数的标准差。
一般将权值
像素值域(range domain R),不管是值域核
- (3)将上述两个模板相乘就得到了双边滤波器的模板权值:

因此,双边滤波器的数据公式可以表示如下:

2. 双边滤波(Bilateral filter)理解
双边滤波(Bilateral filter)其综合了高斯滤波器(Gaussian Filter)和α-截尾均值滤波器(Alpha-Trimmed mean Filter)的特点,同时考虑了空间域与值域的差别,而Gaussian Filter和α均值滤波分别只考虑了空间域和值域差别。高斯滤波器只考虑像素间的欧式距离,其使用的模板系数随着和窗口中心的距离增大而减小;α-截尾均值滤波器则只考虑了像素灰度值之间的差值,去掉α%的最小值和最大值后再计算均值。
2.1 空域权重和值域权重的意义:
- 空域权重
两点之间的距离,距离越远权重越低;
- 值域权重
这里从图像的平坦区域和边缘区域定性分析双边滤波的降噪效果
- 在平坦区域,临近像素的像素值的差值较小,对应值域权重
- 在边缘区域,临近像素的像素值的差值较大,对应值域权重
),当前像素受到的影响就越小,从而保持了原始图像的边缘的细节信息。
3. Opencv双边滤波函数:
opencv中提供了bilateralFilter()函数来实现双边滤波操作,其原型如下:
void cv::bilateralFilter(InputArray src,
OutputArray dst,
int d,
double sigmaColor,
double sigmaSpace,
int borderType = BORDER_DEFAULT
)
- InputArray src: 输入图像,可以是Mat类型,图像必须是8位或浮点型单通道、三通道的图像。
- OutputArray dst: 输出图像,和原图像有相同的尺寸和类型。
- int d: 表示在过滤过程中每个像素邻域的直径范围。如果这个值是非正数,则函数会从第五个参数sigmaSpace计算该值。
- double sigmaColor: 颜色空间过滤器的sigma值,这个参数的值月大,表明该像素邻域内有越宽广的颜色会被混合到一起,产生较大的半相等颜色区域。 (这个参数可以理解为值域核
- double sigmaSpace: 坐标空间中滤波器的sigma值,如果该值较大,则意味着越远的像素将相互影响,从而使更大的区域中足够相似的颜色获取相同的颜色。当d>0时,d指定了邻域大小且与sigmaSpace无关,否则d正比于sigmaSpace. (这个参数可以理解为空间域核
- int borderType=BORDER_DEFAULT: 用于推断图像外部像素的某种边界模式,有默认值BORDER_DEFAULT.
双边滤波器可以很好的保存图像边缘细节而滤除掉低频分量的噪音,但是双边滤波器的效率不是太高,花费的时间相较于其他滤波器而言也比较长。
对于简单的滤波而言,可以将两个sigma值设置成相同的值,如果值<10,则对滤波器影响很小,如果值>150则会对滤波器产生较大的影响,会使图片看起来像卡通。
如果想要尽量保留边缘那么sigmaColor不应该太大(否则会导致领域像素内,差值较大的像素被包含进来计算),这时我们可以考虑增大d,和sigmaSpace的值来滤波,当然我们还可以先将sigmaColor调整大一点,之后再通过拉普拉斯算子做下边缘的增强
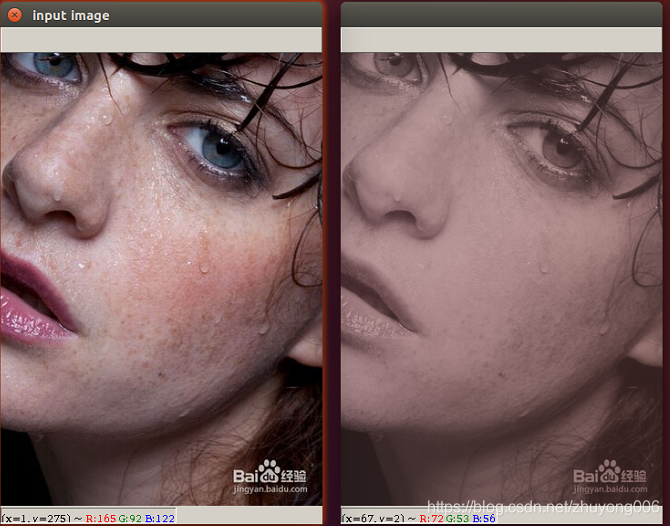
图像美白示例代码:
import cv2 as cv
import numpy as np
def bi_demo(image):
dst = cv.bilateralFilter(image, 0, 50, 10)
cv.imshow("bi_demo", dst)
print("--------- Hello Python ---------")
src = cv.imread("/home/jon/opencv-python-picture/example.png")
cv.namedWindow("input image", cv.WINDOW_AUTOSIZE)
cv.imshow("input image", src)
bi_demo(src)
cv.waitKey(0)
cv.destroyAllWindows()

卡通图像示例代码:
import cv2 as cv
import numpy as np
def bi_demo(image):
dst = cv.bilateralFilter(image, 0, 150, 150)
cv.imshow("bi_demo", dst)
print("--------- Hello Python ---------")
src = cv.imread("/home/jon/opencv-python-picture/example.png")
cv.namedWindow("input image", cv.WINDOW_AUTOSIZE)
cv.imshow("input image", src)
bi_demo(src)
cv.waitKey(0)
cv.destroyAllWindows()















 806
806

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









