







文章链接:http://arxiv.org/pdf/1512.01355
代码链接:https://github.com/bertinetto/staple
1. 考虑了两种方法的结合。Learning the template score(Hog特征)+ Learning the histogram score(简单的颜色直方图)

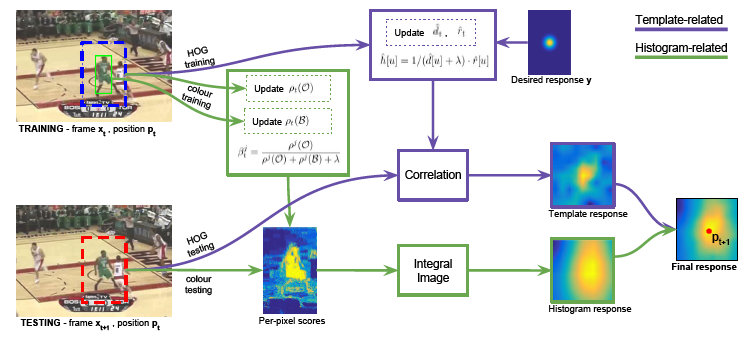
图一 算法整体流程图
2. 方法来源(Motivation)相关滤波用HOG特征时对运动模糊和照度很鲁棒,但是对形变不够鲁棒。而颜色直方图对形变则非常鲁棒。毕竟一个目标有了形变后,整个目标的颜色分布是基本不会变的。另一方面,颜色直方图对光照变化不鲁棒,这一点又可以由HOG特征进行互补。因此作者考虑同时使用这两种特征,分成两个通道来做,如图一。
3. 整体新意就在于两种方法的结合,互补之后效果鲁棒,速度很快,因为相关滤波用在跟踪中,可以用FFT(快速傅里叶变换)进行加速,如KCF的速度可以到140FPS,这篇文章中提到的他的速度为80FPS。
4. 效果在OTB50上还不错,在VOT14和VOT15上非常好。如图二和图三。作者给出的OTB50的结果我在与自己的文章比较时有跑,定位精度(precision)这个指标不是那么靠前,所以在文章中并没给出,但是overlap这个指标还不错,这是因为除了算法本身对结果的提升,作者还有考虑对尺度的处理,用的是[1]的尺度金字塔方法,只加到HOG上了,颜色特征没有加尺度,因为对颜色加尺度意义不大,反而会让结果更差。
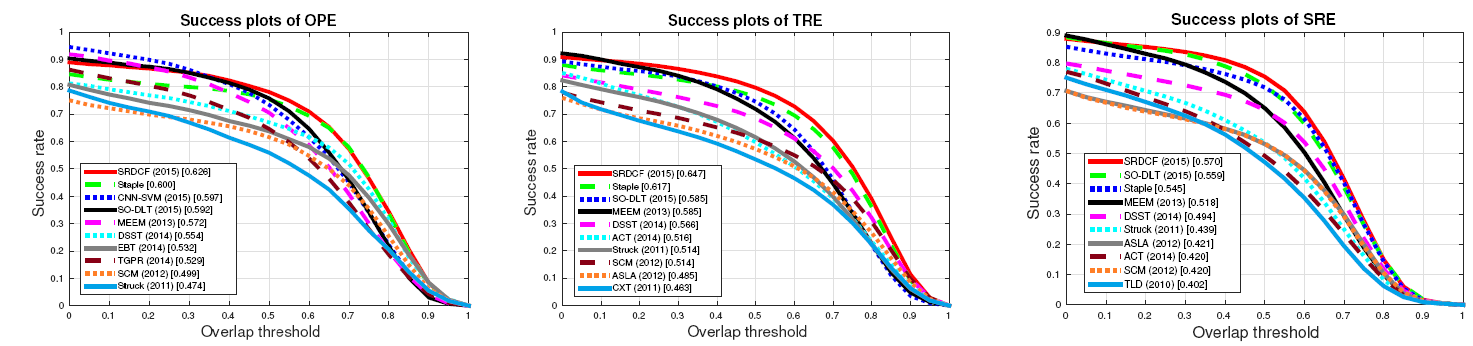
图二 OTB结果OPE,TRE,SRE的overlap结果
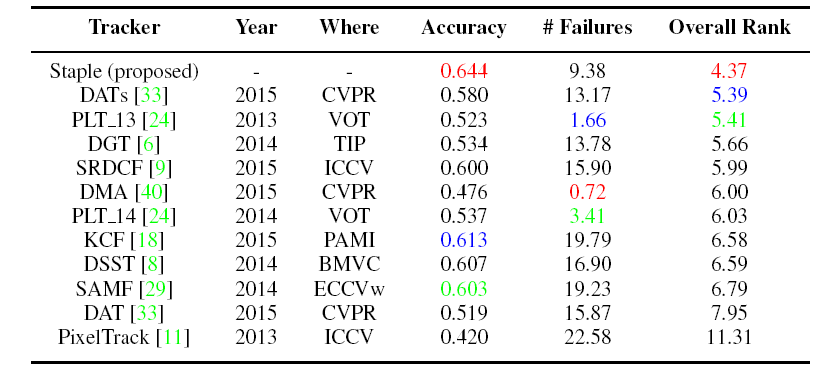
图三 VOT14的综合结果排名表
[1] Danelljan M, Häger G, Khan F, et al. Accurate scale estimation for robust visual tracking[C]//British Machine Vision Conference, Nottingham, September 1-5, 2014. BMVA Press, 2014.
微信公众号code无涯同步更新,欢迎关注。
















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









