







凹缺陷/凸缺陷
前面我们已经学习了轮廓的凸包,对象上的任何凹陷都被成为凸缺陷。OpenCV 中有一个函数 cv.convexityDefect() 可以帮助我们找到凸缺陷。函数调用如下:
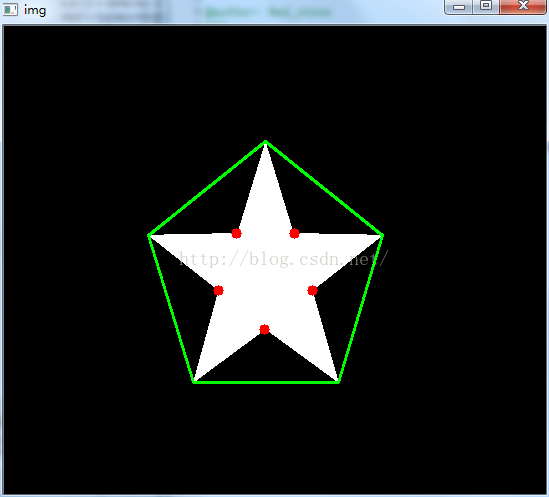
defects = cv2.convexityDefects(cnt,hull) ##反馈的是Nx4的数组,第一列表示的是起点(轮廓集合中点的编号)、第二列表示的是终点(轮廓集合中点的编号)
##第三列表示的是最远点(轮廓集合中点的编号),第四列表示的是最远点到凸轮廓的最短距离for i in range(defects.shape[0]): s,e,f,d = defects[i,0] start = tuple(cnt[s][0]) end = tuple(cnt[e][0]) far = tuple(cnt[f][0]) cv2.line(img,start,end,[0,255,0],2) cv2.circle(img,far,5,[0,0,255],-1)cv2.imshow('img',img)cv2.waitKey(0)cv2.destroyAllWindows()
点与轮廓关系
求解图像中的一个点到一个对象轮廓的最短距离。如果点在轮廓的外部,返回值为负。如果在轮廓上,返回值为 0。如果在轮廓内部,返回值为正。
下面我们以点(50,50)为例:
此函数的第三个参数是 measureDist。如果设置为 True,就会计算最短距离。如果是 False,只会判断这个点与轮廓之间的位置关系(返回值为+1,-1,0)。
形状匹配
函数 cv2.matchShape() 可以帮我们比较两个形状或轮廓的相似度。如果返回值越小,匹配越好。它是根据 Hu 矩来计算的。文档中对不同的方法都有解释。















 1038
1038

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









