







 本文介绍了如何利用OpenCV库检测图像中的凸包缺陷,包括概念解析、相关函数介绍以及代码实现。通过convexHull和convexityDefects函数,可以找出图像轮廓与其凸包之间的缺陷区域,并获取每个缺陷的起始点、结束点、最远点和深度信息。代码示例展示了如何绘制缺陷,并特别指出仅显示深度在20到80之间的缺陷点。
本文介绍了如何利用OpenCV库检测图像中的凸包缺陷,包括概念解析、相关函数介绍以及代码实现。通过convexHull和convexityDefects函数,可以找出图像轮廓与其凸包之间的缺陷区域,并获取每个缺陷的起始点、结束点、最远点和深度信息。代码示例展示了如何绘制缺陷,并特别指出仅显示深度在20到80之间的缺陷点。
一 概念:
Convexity hull, Convexity defects
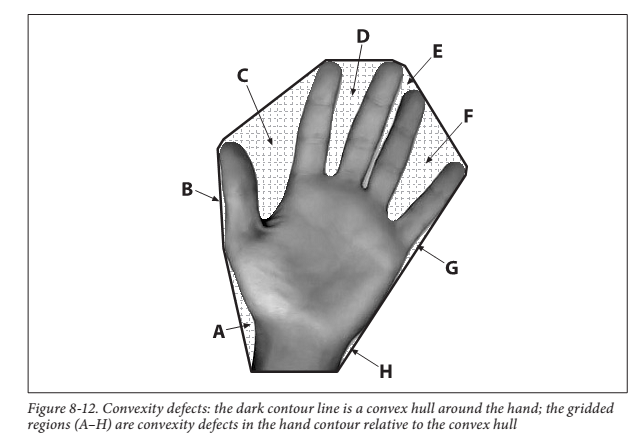
如上图所示,黑色的轮廓线为convexity hull, 而convexity hull与手掌之间的部分为convexity defects. 每个convexity defect区域有四个特征量:起始点(startPoint),结束点(endPoint),距离convexity hull最远点(farPoint),最远点到convexity hull的距离(depth)。
二.OpenCV中的相关函数
void convexityDefects(InputArray contour, InputArray convexhull, OutputArrayconvexityDefects)
参数:
coutour: 输入参数,检测到的轮廓,可以调用findContours函数得到;
convexhull: 输入参数,检测到的凸包,可以调用convexHull函数得到。注意,convexHull函数可以得到vector<vector<Point>>和vector<vector<int>>两种类型结果,这里的convexhull应该为vector<vector<i
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1065
1065

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









