







代码:
- #include <cv.h>
- #include <cxcore.h>
- #include <highgui.h>
- #include <cvaux.h>
- #include <iostream>
- using namespace std;
- int main()
- {
- IplImage *src = cvLoadImage("f:\\images\\test2.bmp",CV_LOAD_IMAGE_GRAYSCALE);
- IplImage *dst = cvCreateImage(cvGetSize(src),8,3);cvZero(dst);
- CvMemStorage *storage = cvCreateMemStorage();
- CvSeq *contour = NULL , *hull = NULL;
- CvContourScanner scanner = cvStartFindContours(src,storage);
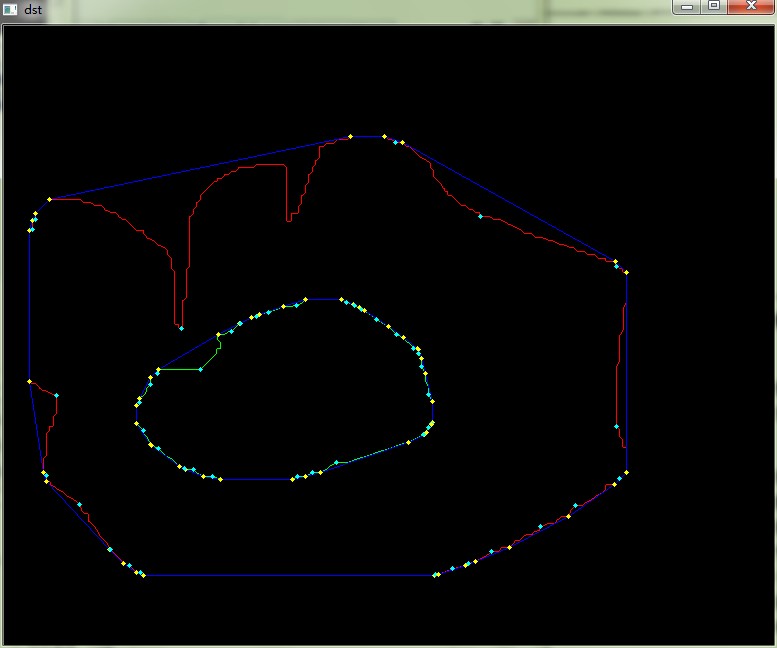
- while((contour = cvFindNextContour(scanner)) != NULL){
- cvDrawContours(dst,contour,CV_RGB(255,0,0),CV_RGB(0,255,0),0);
- cout<<cvCheckContourConvexity(contour)<<endl;
- hull = cvConvexHull2(contour,0,CV_CLOCKWISE,0);
- CvPoint pt0 = **(CvPoint**)cvGetSeqElem(hull,hull->total - 1);
- for(int i = 0;i<hull->total;++i){
- CvPoint pt1 = **(CvPoint**)cvGetSeqElem(hull,i);
- cvLine(dst,pt0,pt1,CV_RGB(0,0,255));
- pt0 = pt1;
- }
- CvSeq *defect = cvConvexityDefects(contour,hull);
- for(int i = 0;i<defect->total;++i){
- CvConvexityDefect df = *(CvConvexityDefect*)cvGetSeqElem(defect,i);
- cvCircle(dst,*df.start,2,CV_RGB(255,255,0),-1);
- cvCircle(dst,*df.end,2,CV_RGB(255,255,0),-1);
- cvCircle(dst,*df.depth_point,2,CV_RGB(0,255,255),-1);
- }
- cvShowImage("dst",dst);
- cvWaitKey();
- }
- cvEndFindContours(&scanner);
- }

网址:http://blog.csdn.net/fdl19881/article/details/6732682















 963
963

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









