



安装apollo
环境
- Ubuntu 18.04+
- Docker 19.03+
- GPU 支持(可选)
可以参考Apollo官方安装教程
安装过程
1. 克隆 Apollo 源码
执行以下命令克隆 Apollo 源码
# SSH 方式
git clone git@github.com:ApolloAuto/apollo.git
# HTTPS 方式
git clone https://github.com/ApolloAuto/apollo.git
检出到最新分支:
cd apollo
git checkout master
2. 启动 Apollo 环境容器
在 apollo 目录下输入以下命令来启动环境容器
bash docker/scripts/dev_start.sh
操作成功后您将会看到如下样式的提示输出
[ OK ] Congratulations! You have successfully finished setting up Apollo Dev Environment.
[ OK ] To login into the newly created apollo_dev_michael container, please run the following command:
[ OK ] bash docker/scripts/dev_into.sh
[ OK ] Enjoy!
3. 进入 Apollo 环境容器
在 apollo 目录下输入以下命令进入容器
bash docker/scripts/dev_into.sh
4. 编译
在容器内的 /apollo 目录下输出以下命令编译整个工程
./apollo.sh build
若需要开启编译优化,则通过以下命令进行编译
./apollo.sh build_opt
启动Apollo
- 通过以下方式进入 docker 容器:
$APOLLO_HOME/docker/scripts/dev_start.sh
$APOLLO_HOME/docker/scripts/dev_into.sh
- 构建 Apollo
./apollo.sh build_opt_gpu
- 运行 bootstrap.sh
bash scripts/bootstrap.sh
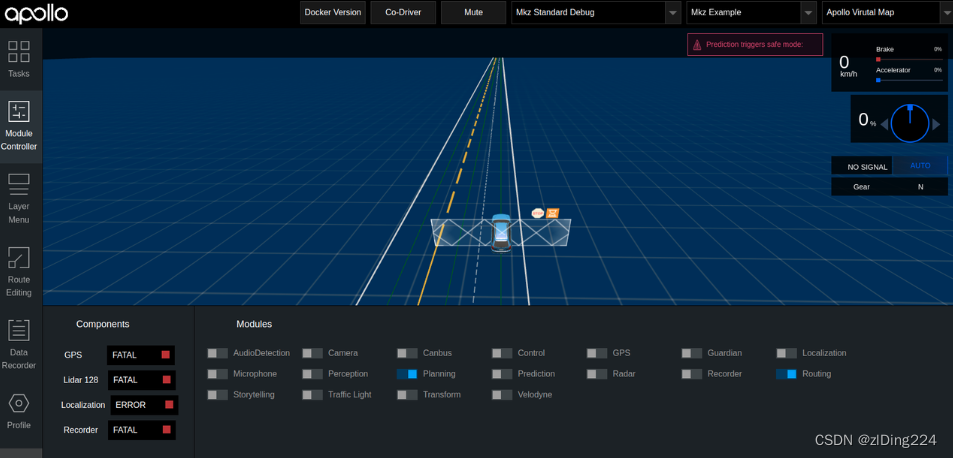
- 通过输入 http://localhost:8888/ 从 Web 浏览器启动 Dreamview
- 使用 Dreamview 右上角的下拉选项选择您的汽车和地图,在 Dreamview 中选择变换按钮
启动Perception感知模块
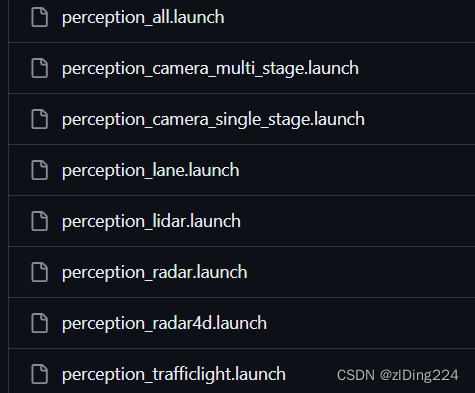
感知模块启动脚本如上所示,可以在命令行中启动,也可以在Dreamview图形化界面启动所需要的模块。
- 启动感知中所有模块
cyber_launch start /apollo/modules/perception/production/launch/perception_all.launch
- 测试基于摄像头的障碍物和车道检测
cyber_launch start /apollo/modules/perception/production/launch/perception_camera.launch
- 播放录制的包
cyber_recorder play -f /apollo/data/bag/anybag -r 0.2

















 1290
1290

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









