






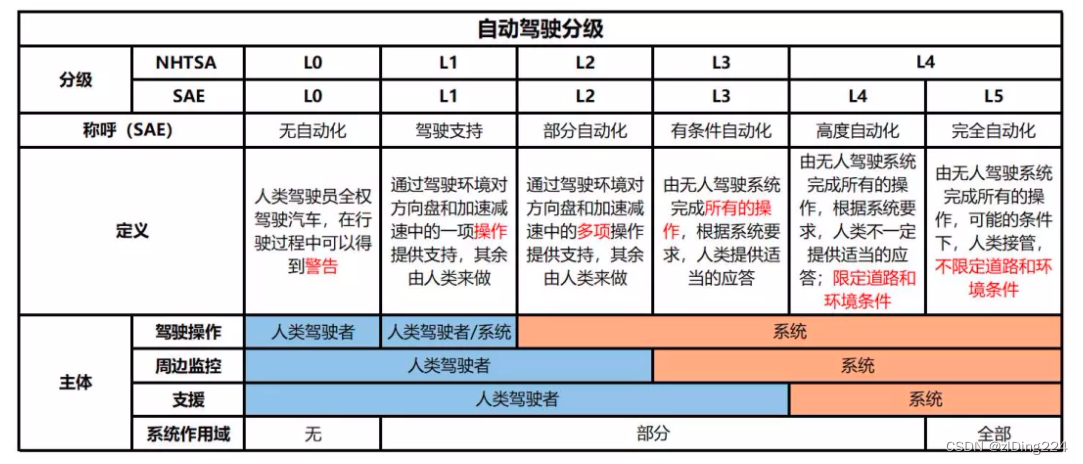
AutoDriving 本文主要了解自动驾驶的分级,了解自动驾驶的基本原理,基本模块(感知、规划、控制),基本流程,测试场景。
基本原理:通过传感器实时感知车辆及周边环境的情况,再通过智能系统进行规化决策,最后通过控制系统执行驾驶操作。
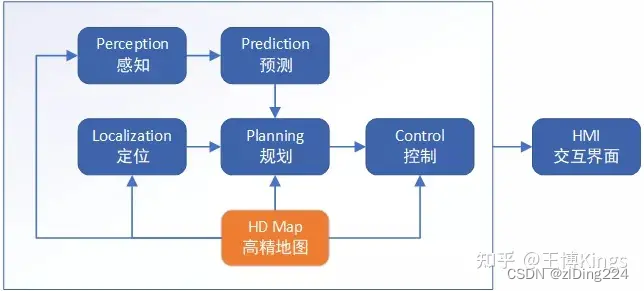
基本模块:地图引擎(Map)、高精定位(Localization)、感知(Perception)、预测(Prediction)、规划(Planning)、控制(Control)。
自动驾驶测试场景: 是指在一定的时间和空间范围内,自动驾驶汽车与行驶环境中的其它车辆、道路、交通设施、气象条件等元素综合交互过程的一种总体动态描述。它是自动驾驶汽车的驾驶情景与行驶环境的有机组合,既包括各类实体元素,也涵盖了实体执行的动作及实体之间的连接关系。
基本原理
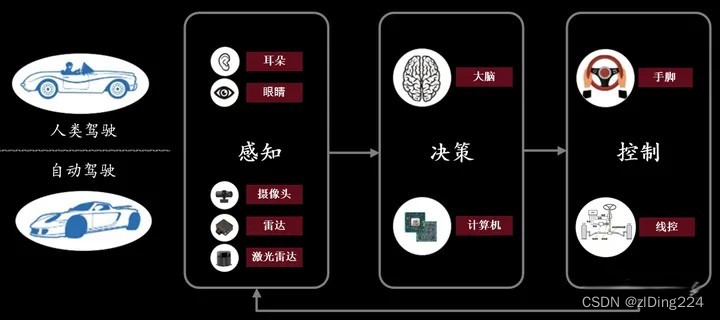
通过传感器实时感知车辆及周边环境的情况,再通过智能系统进行规化决策,最后通过控制系统执行驾驶操作。
通过包括三个环节:
-
感知: 车辆自身以及环境信息的采集与处理,包括视频信息、GPS信息、车辆姿态、加速度信息等等。好比是人类的眼睛、耳朵、皮肤一样去收集。具体的比如前方是否有车,前方障碍物是否是人,红绿灯是什么颜色,自车的车速如何,路面情况如何等等信息,都是需要去感知的。
-
决策: 依据感知到的情况,进行决策判断,确定适当的工作模型,制定适当的控制策略,代替人类做出驾驶决策。决策主要依赖的是芯片和算法,就好比是人类的大脑。看到红灯,决策需要停止;观察到前车很慢,决定从右侧超车;有小孩突然闯入道路,进行紧急制动。
-
控制: 系统做出决策后,自动对车辆进行相应的操作执行。类比人类进行的方向盘以及油门、刹车的操作。系统通过线控系统将控制命令传递到底层模块执行对应操作任务。如左转5度。
硬件系统
硬件系统在各层都有。
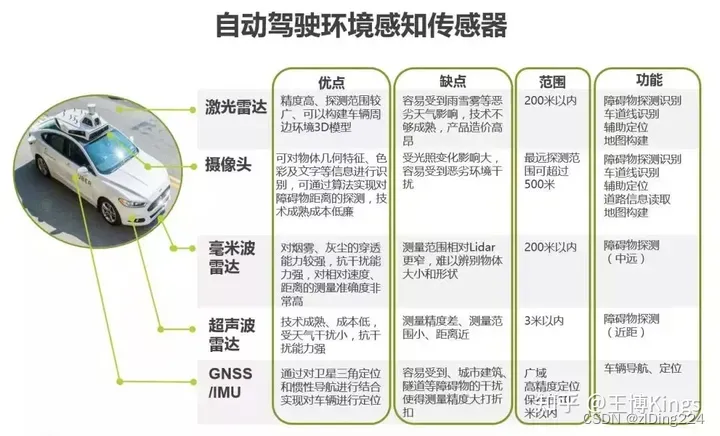
感知层主要是为自动驾驶系统获取外部行驶道路环境数据并帮助系统进行车辆定位。当前无人驾驶系统中代表性的传感器有摄像头、激光雷达、毫米波雷达、超声波雷达、GNSS/IMU等。它们的工作原理、技术特性各不相同,决定了适用的场景也不同。当前大部分车辆都是采用多种传感器相融合的方式以应对各种可能发生的情况,保证较好的实际使用效果。主流传感器的优缺点参考如下图。其他还有一些传感器在一些方案中也会被使用,如麦克风阵列,红外相机等。
感知层会收集大量的自车和环境数据,决策层需要自动驾驶芯片流畅地处理这些数据才能保证系统及时作出正确的决策,从而控制车辆自动行驶并确保安全。智能系统的三大要素是数据、算法和算力,而算力的根本就是芯片。芯片是决策层最为重要的硬件。
控制层则相对简单,主要是线控。线控就是用线(电信号)的形式来取代机械、液压或气动等形式的连接,实现电子控制,从而不再需要驾驶员的力量或者扭矩的输入。对于自动驾驶来说,核心的三个线控子系统是线控油门、线控转向、线控制动。
软件系统
-
地图引擎(Map): 提供道路、周边建筑等地图信息,高精地图还包含全局车道、曲率、坡度、红绿灯、护栏情况等等信息。如地图可以透出前方右拐急弯曲率及下坡坡度。
-
高精定位(Localization): 定位是一个重要模块,L3及以上自动驾驶场景需要高精定位,是车辆信息感知的一个重要元素。如定位到车辆在行进方向右边第二车道,该车道只能直行不能右拐。
-
感知(Perception): 感知模块接受并处理传感器信息,从而识别自车以及周边的情况。如感知到车辆的速度,感知到前方50米有一个行人。
-
预测(Prediction): 预测模块主要用于预测感知到的障碍物的运动轨迹。如在行驶中,感知到左侧道路有一辆车,根据车辆的状态和历史运动轨迹,预测车辆后续运动轨迹,识别是否有碰撞风险。
-
规划(Planning): 根据感知到的信息,规划出一条到达目的地的行进路线,而且还需要规划出未来一段时间内,每一时刻所在位置的精细轨迹和自车状态。如规划轨迹向左偏移并加速,超车后回到道路中心线附近。
-
控制(Control): 如字面意思,通过指令控制车辆硬件进行操作,如发送减速指令到制动器执行制动操作。
-
交互界面(HMI): 人类在中控屏幕上看到的人机交互模块。如自动驾驶系统通过HMI向乘客实时展示系统识别到的自车位置及周边障碍物信息,有助于提升乘客的安全感。HMI在人车共驾的过度阶段更有价值。
• 实时操作系统(RTOS): Real Time Operation System 根据感知的数据信息,及时进行计算和分析并执行相应的控制操作。
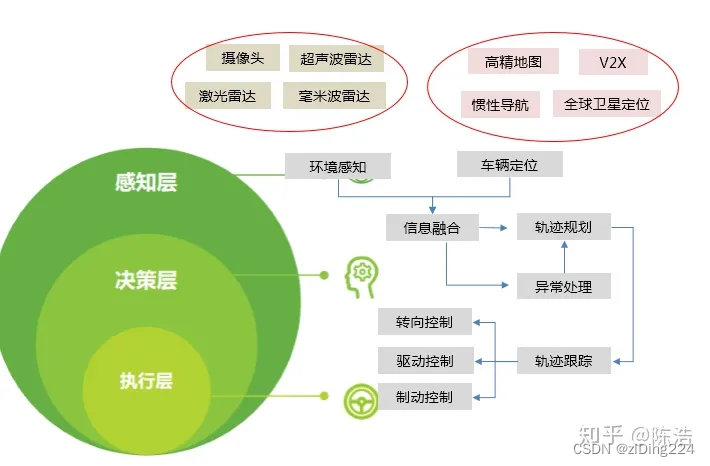
如下为整个架构的数据流向图,从中可以看出各模块的上下游依赖关系。感知是预测的上游;感知、预测、定位、地图又是规划的上游;而控制则是规划的下游;HMI则处于整个系统的下游。从中我们也可以看出,各模块对于高精地图都有依赖,可见高精地图的重要性。高精地图采集分为集中制图和众包制图两种,未来最可能普遍采用的方式是集中制图+众包更新,也可能是直接全众包SLAM制图,够用就好。
感知模块:主动感知与被动感知
什么是感知:
感知是将各类硬件传感器采集到的数据进行收集、处理,并生成实时的感知结果的过程:
- 通过传感器来判断周边障碍物的距离、类型、形状等
- 通过采集到的图片利用提前准备好的深度学习算法识别出画面中的语义信息(车牌、交通标志等)
感知范围和距离是:
- 摄像头视觉负责长距离障碍物识别(100-250米)
- 毫米波雷达负责中距离障碍物识别 (10-100米)
- 超声波传感器负责近距离障碍物识别(10米以内)
主动感知(Active Perception):
通过传感器发现的障碍物信息被采集到之后,主动发送到车辆的控制和计划模块(Control and Planning)进行统一的计算和判断,然后再根据当前的交通环境和车辆状态给出一系列的行动命令。
比如:通过双目摄像头采集到的空间信息(Spatial Information,又称几何感知),车辆可以识别画面中出现的障碍物距离本车的距离,再结合经过深度学习训练后的语义信息框架(Semantic Information)来判断场景中的具体物体类型,例如道路线、车辆、行人等;然后通过车辆的控制和计划模块,结合当前车辆的状态(车速、位置等),给出实时的车辆行为判断。
被动感知(Passive Perception):
当传感器(摄像头、超声波、雷达等)发现障碍物时,如果把原始数据先发给车辆的控制和计划模块等系统分析出结果,并做出行为判断,再到执行时,很有可能就来不及了(例如时速60km/h突然发现前车危险并线);
这时需要传感器直接将数据通过CAN Bus(可以理解为车辆内部各零部件的信息传输网络,比如雨水感应器发现下雨了,就将信号通过CAN Bus发送给雨刷器执行操作)发送给能执行车辆物理操作的底盘系统决策模块。在这种场景下,可以直接控制底盘的决策模块能够迅速执行提前定义好的操作(例如当障碍物出现在行驶方向的3米范围内就执行转向或刹车等)。
被动感知的核心理念在于当障碍物出现在非常近的距离范围内时,为了最大的降低出现事故的风险,需要最快速的做出决策并执行,所以不需要经过车辆的控制和计划模块。
测试场景
定义与作用
自动驾驶测试场景: 是指在一定的时间和空间范围内,自动驾驶汽车与行驶环境中的其它车辆、道路、交通设施、气象条件等元素综合交互过程的一种总体动态描述。它是自动驾驶汽车的驾驶情景与行驶环境的有机组合,既包括各类实体元素,也涵盖了实体执行的动作及实体之间的连接关系。
测试场景的作用: 在自动驾驶汽车设计、研发、测试和评价中扮演重要角色;开展自动驾驶汽车测试评价的重要前提;基于场景的自动驾驶汽车测试方法是实现加速测试、加速评价的有效途径;测试、验证、评价自动驾驶功能与性能的关键,贯穿自动驾驶车辆研发测试全生命周期。
要素
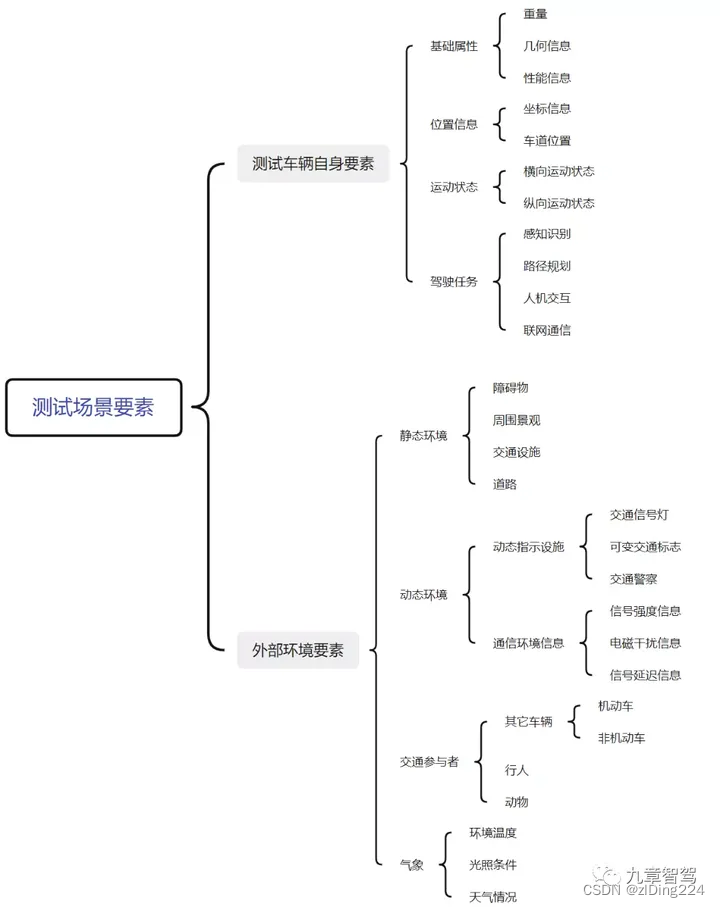
测试场景要素:主要分为测试车辆自身要素和外部交通环境要素两大部分;外部交通环境要素又涵盖:静态环境要素、动态环境要素、交通参与者要素、气象要素等。
- 测试车辆自身要素:指测试车辆自身的基础属性、位置信息、运动状态信息及驾驶任务信息。
- 静态环境要素:指交通环境中静止状态的物体。
包括:道路、交通设施、周围景观以及障碍物等。 - 动态环境要素:指交通环境中处于动态变化的要素。
**包括:**动态指示设施 和 通信环境信息。 - 交通参与者要素:在自动驾驶测试场景中对本车决策规划造成影响的对象信息。
**包括:**车辆、行人和动物。 - 气象要素:包括驾驶场景中的环境温度、光照条件以及天气情况等信息。
分类
1.按照场景的抽象程度可分为:功能场景、逻辑场景、具体场景
三者之间的关系:
自动驾驶系统开发需经历的三个阶段:概念阶段、系统开发阶段、测试阶段;随着系统开发过程的逐渐深入,测试场景的抽象程度需求不断降低,但测试场景的数量需求却不断在增加。通过将结构化的功能场景与参数范围相结合能够转换生成逻辑场景,参数范围可以通过数据驱动方法来定义。每个逻辑场景都可以通过从参数范围中选择具体值来转换为具体场景。
- a.功能场景
- 通过语义描述的最抽象级别的操作场景, 即通过语言场景符号来描述场景区域内的实体以及实体间的关系;
- 功能场景用于概念阶段的项目定义、危险分析和风险评估;在测试过程中,往往需要将功能场景转换为逻辑场景,并转换为可用于相应仿真环境的数据格式。
- b.逻辑场景
- 通过定义状态空间内变量的参数范围来表达实体特征和实体间的关系;
- 逻辑场景是基于状态空间变量对功能场景的进一步详细描述,用于项目开发阶段生成需求;对于每一个具有连续取值范围的逻辑场景, 都可以派生出任意数量的具体场景。
- c.具体场景
- 通过确定状态空间中每个参数的具体值来描述实体和实体间的关系,以状态空间详细描述了测试场景;
- 具体场景可以直接转化为测试用例;要将具体场景转换成测试用例, 需要增加被测对象的预期行为表现以及对相关测试设施的需求。
2.按照测试场景数据来源分类:自然驾驶场景、危险工况场景、标准法规场景、参数重组场景
- a. 自然驾驶场景
- 数据源自汽车真实的自然驾驶状态场景下,是最基础的数据来源;包含自动驾驶汽车所处的人-车-环境-任务等全方位信息;
- 自然驾驶场景能够提供车辆数据、驾驶人行为、道路环境等多维度信息,是证明自动驾驶有效性的一种充分测试场
- b. 危险工况场景
- 数据主要来源于交通事故数据库,是自动驾驶控制策略安全性和可靠性验证的关键;
- 危险工况场景主要涵盖恶劣天气环境、复杂道路交通以典型交通事故三大类场景,是证明自动驾驶有效性的一种必要测试场景。
- c. 标准法规场景
- 数据主要来源于现有的标准、评价规程等,如ISO、NHTSA、E-NCAP、C-NCAP等多项标准、评价规程对现有自动驾驶功能进行了测试规定;
- 标准法规测试场景是自动驾驶功能在研发和认证阶段必须要满足的基础测试场景。
- d. 参数重组场景
- 数据来源于现有场景数据库资源,通过对已有的仿真场景进行参数化设置,随机生成或自动重组相应类型的场景;
- 参数重组场景通过对静态要素、动态要素以及驾驶人行为要素等进行不同排列组合及遍历取值,扩展参数重组场景边界;有效覆盖自动驾驶功能测试盲区,是对未知工况的有效补充测试场景。
参考
https://zhuanlan.zhihu.com/p/415307584
https://zhuanlan.zhihu.com/p/79131539
https://zhuanlan.zhihu.com/p/157480600















 976
976

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









