









import cv2
import numpy as np
from matplotlib import pyplot as plt
__author__ = "zxsuperstar"
__email__ = "zxsuperstar@163.com"
"""
图像梯度
一阶导数和Soble算子
Sobel算子是普通一阶差分,是基于寻找梯度强度。拉普拉斯算子(二阶差分)是基于过零点检测。通过计算梯度,设置阀值,得到边缘图像。
二阶导数和拉普拉斯算子
"""
def sobel_demo(image):
grad_x = cv2.Sobel(image, cv2.CV_32F,1,0) #x方向一阶导数
grad_y = cv2.Sobel(image, cv2.CV_32F,0,1)
gradx = cv2.convertScaleAbs(grad_x) #将其转回原来的uint8形式
grady = cv2.convertScaleAbs(grad_y)
cv2.imshow("gradient_x",gradx)
cv2.imshow("gradient_y",grady)
gradxy = cv2.addWeighted(gradx,0.5,grady,0.5,0)
cv2.imshow("gradient_xy", gradxy)
def scharr_demo(image):
grad_x = cv2.Scharr(image, cv2.CV_32F,1,0) #x方向一阶导数
grad_y = cv2.Scharr(image, cv2.CV_32F,0,1)
gradx = cv2.convertScaleAbs(grad_x)
grady = cv2.convertScaleAbs(grad_y)
cv2.imshow("gradient_x",gradx)
cv2.imshow("gradient_y",grady)
gradxy = cv2.addWeighted(gradx,0.5,grady,0.5,0)
cv2.imshow("gradient_xy", gradxy)
def lapalian_demo(image): #拉普拉斯算子
# dst = cv2.Laplacian(image,cv2.CV_32F)
# lpls = cv2.convertScaleAbs(dst)
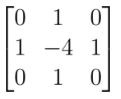
kernel = np.array([[0,1,0],[1,-4,1],[0,1,0]])
dst = cv2.filter2D(image,cv2.CV_32F, kernel=kernel)
lpls = cv2.convertScaleAbs(dst) #单通道
cv2.imshow("lapalian", lpls)
if __name__ == "__main__":
src = cv2.imread("t.jpg") #blue green red
# cv2.namedWindow("image", cv2.WINDOW_AUTOSIZE)
cv2.imshow("image",src)
# sobel_demo(src)
# scharr_demo(src)
lapalian_demo(src)
cv2.waitKey(0)
cv2.destroyAllWindows()
说明:
1.Sobel算子用来计算图像灰度函数的近似梯度。Sobel算子根据像素点上下、左右邻点灰度加权差,在边缘处达到极值这一现象检测边缘。对噪声具有平滑作用,提供较为精确的边缘方向信息,边缘定位精度不够高。当对精度要求不是很高时,是一种较为常用的边缘检测方法。
2.Sobel具有平滑和微分的功效。即:Sobel算子先将图像横向或纵向平滑,然后再纵向或横向差分,得到的结果是平滑后的差分结果。
OpenCV的Sobel函数原型为:Sobel(src, ddepth, dx, dy[, dst[, ksize[, scale[, delta[, borderType]]]]]) -> dst
src参数表示输入需要处理的图像。
ddepth参数表示输出图像深度,针对不同的输入图像,输出目标图像有不同的深度。
具体组合如下:
src.depth() = CV_8U, 取ddepth =-1/CV_16S/CV_32F/CV_64F (一般源图像都为CV_8U,为了避免溢出,一般ddepth参数选择CV_32F)
src.depth() = CV_16U/CV_16S, 取ddepth =-1/CV_32F/CV_64F
src.depth() = CV_32F, 取ddepth =-1/CV_32F/CV_64F
src.depth() = CV_64F, 取ddepth = -1/CV_64F
注:ddepth =-1时,代表输出图像与输入图像相同的深度。
dx参数表示x方向上的差分阶数,1或0 。
dy参数表示y 方向上的差分阶数,1或0 。
dst参数表示输出与src相同大小和相同通道数的图像。
ksize参数表示Sobel算子的大小,必须为1、3、5、7。
scale参数表示缩放导数的比例常数,默认情况下没有伸缩系数。
delta参数表示一个可选的增量,将会加到最终的dst中,同样,默认情况下没有额外的值加到dst中。
borderType表示判断图像边界的模式。这个参数默认值为cv2.BORDER_DEFAULT。
3.OpenCV的convertScaleAbs函数使用线性变换转换输入数组元素成8位无符号整型。函数原型:convertScaleAbs(src[, dst[, alpha[, beta]]]) -> dst
src参数表示原数组。
dst参数表示输出数组 (深度为 8u)。
alpha参数表示比例因子。
beta参数表示原数组元素按比例缩放后添加的值。
4.OpenCV的addWeighted函数是计算两个数组的加权和。函数原型:addWeighted(src1, alpha, src2, beta, gamma[, dst[, dtype]]) -> dst
src1参数表示需要加权的第一个输入数组。
alpha参数表示第一个数组的权重。
src2参数表示第二个输入数组,它和第一个数组拥有相同的尺寸和通道数。
beta参数表示第二个数组的权重。
gamma参数表示一个加到权重总和上的标量值。
dst参数表示输出的数组,它和输入的两个数组拥有相同的尺寸和通道数。
dtype参数表示输出数组的可选深度。当两个输入数组具有相同的深度时,这个参数设置为-1(默认值),即等同于src1.depth()。
5.拉普拉斯算子(Laplace Operator)是n维欧几里德空间中的一个二阶微分算子,定义为梯度(▽f)的散度(▽·f)。
6.OpenCV的Laplacian函数原型为:Laplacian(src, ddepth[, dst[, ksize[, scale[, delta[, borderType]]]]]) -> dst
src参数表示输入需要处理的图像。
ddepth参数表示输出图像深度,针对不同的输入图像,输出目标图像有不同的深度。
具体组合如下:
src.depth() = CV_8U, 取ddepth =-1/CV_16S/CV_32F/CV_64F (一般源图像都为CV_8U,为了避免溢出,一般ddepth参数选择CV_32F)
src.depth() = CV_16U/CV_16S, 取ddepth =-1/CV_32F/CV_64F
src.depth() = CV_32F, 取ddepth =-1/CV_32F/CV_64F
src.depth() = CV_64F, 取ddepth = -1/CV_64F
注:ddepth =-1时,代表输出图像与输入图像相同的深度。
dst参数表示输出与src相同大小和相同通道数的图像。
ksize参数表示用于计算二阶导数滤波器的孔径大小,大小必须是正数和奇数。
scale参数表示计算拉普拉斯算子值的比例因子,默认情况下没有伸缩系数。
delta参数表示一个可选的增量,将会加到最终的dst中,同样,默认情况下没有额外的值加到dst中。
borderType表示判断图像边界的模式。这个参数默认值为cv2.BORDER_DEFAULT。
补:
这里ksize参数默认值为1,此时Laplacian()函数采用以下3x3的孔径:















 3073
3073











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









