







本文转载自:http://blog.csdn.net/xnwyd/article/details/7198728
版权声明:本文为博主原创文章,未经博主允许不得转载。
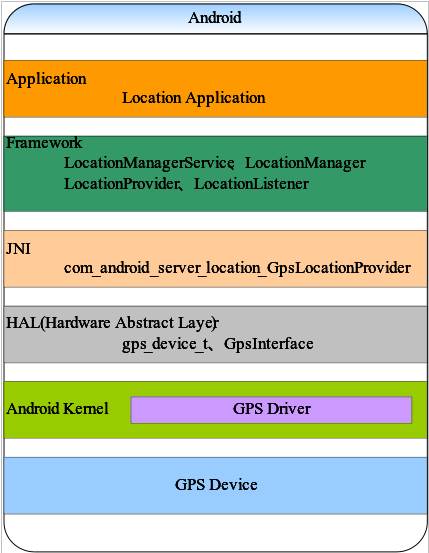
1 GPS架构
2 GPS分析
2.1 头文件
头文件定义在:hardware/libhardware/include/hardware/gps.h,定义了GPS底层相关的结构体和接口
-
GpsLocation
GPS位置信息结构体,包含经纬度,高度,速度,方位角等。
- /** Flags to indicate which values are valid in a GpsLocation. */
- typedef uint16_t GpsLocationFlags;
- // IMPORTANT: Note that the following values must match
- // constants in GpsLocationProvider.java.
- /** GpsLocation has valid latitude and longitude. */
- #define GPS_LOCATION_HAS_LAT_LONG 0x0001
- /** GpsLocation has valid altitude. */
- #define GPS_LOCATION_HAS_ALTITUDE 0x0002
- /** GpsLocation has valid speed. */
- #define GPS_LOCATION_HAS_SPEED 0x0004
- /** GpsLocation has valid bearing. */
- #define GPS_LOCATION_HAS_BEARING 0x0008
- /** GpsLocation has valid accuracy. */
- #define GPS_LOCATION_HAS_ACCURACY 0x0010
- /** Represents a location. */
- typedef struct {
- /** set to sizeof(GpsLocation) */
- size_t size;
- /** Contains GpsLocationFlags bits. */
- uint16_t flags;
- /** Represents latitude in degrees. */
- double latitude;
- /** Represents longitude in degrees. */
- double longitude;
- /** Represents altitude in meters above the WGS 84 reference
- * ellipsoid. */
- double altitude;
- /** Represents speed in meters per second. */
- float speed;
- /** Represents heading in degrees. */
- float bearing;
- /** Represents expected accuracy in meters. */
- float accuracy;
- /** Timestamp for the location fix. */
- GpsUtcTime timestamp;
- } GpsLocation;
-
GpsStatus
GPS状态包括5种状态,分别为未知,正在定位,停止定位,启动未定义,未启动。
- /** GPS status event values. */
- typedef uint16_t GpsStatusValue;
- // IMPORTANT: Note that the following values must match
- // constants in GpsLocationProvider.java.
- /** GPS status unknown. */
- #define GPS_STATUS_NONE 0
- /** GPS has begun navigating. */
- #define GPS_STATUS_SESSION_BEGIN 1
- /** GPS has stopped navigating. */
- #define GPS_STATUS_SESSION_END 2
- /** GPS has powered on but is not navigating. */
- #define GPS_STATUS_ENGINE_ON 3
- /** GPS is powered off. */AgpsCallbacks
- AgpsInterface
- #define GPS_STATUS_ENGINE_OFF 4
- /** Represents the status. */
- typedef struct {
- /** set to sizeof(GpsStatus) */
- size_t size;
- GpsStatusValue status;
- } GpsStatus;
-
GpsSvInfo
GPS卫星信息,包含卫星编号,信号强度,卫星仰望角,方位角等。
- /** Represents SV information. */
- typedef struct {
- /** set to sizeof(GpsSvInfo) */
- size_t size;
- /** Pseudo-random number for the SV. */
- int prn;
- /** Signal to noise ratio. */
- float snr;
- /** Elevation of SV in degrees. */
- float elevation;
- /** Azimuth of SV in degrees. */
- float azimuth;
- } GpsSvInfo;
-
GpsSvStatus
GPS卫星状态,包含可见卫星数和信息,星历时间,年历时间等。
- /** Represents SV status. */
- typedef struct {
- /** set to sizeof(GpsSvStatus) */
- size_t size;
- /** Number of SVs currently visible. */
- int num_svs;
- /** Contains an array of SV information. */
- GpsSvInfo sv_list[GPS_MAX_SVS];
- /** Represents a bit mask indicating which SVs
- * have ephemeris data.
- */
- uint32_t ephemeris_mask;
- /** Represents a bit mask indicating which SVs
- * have almanac data.
- */
- uint32_t almanac_mask;
- /**
- * Represents a bit mask indicating which SVs
- * were used for computing the most recent position fix.
- */
- uint32_t used_in_fix_mask;
- } GpsSvStatus;
-
GpsCallbacks
回调函数定义
- /** Callback with location information. 向上层传递GPS位置信息
- * Can only be called from a thread created by create_thread_cb.
- */
- typedef void (* gps_location_callback)(GpsLocation* location);
- /** Callback with status information. 向上层传递GPS状态信息
- * Can only be called from a thread created by create_thread_cb.
- */
- typedef void (* gps_status_callback)(GpsStatus* status);
- /** Callback with SV status information. 向上层传递GPS卫星信息
- * Can only be called from a thread created by create_thread_cb.
- */
- typedef void (* gps_sv_status_callback)(GpsSvStatus* sv_info);
- /** Callback for reporting NMEA sentences. 向上层传递MEMA数据
- * Can only be called from a thread created by create_thread_cb.
- */
- typedef void (* gps_nmea_callback)(GpsUtcTime timestamp, const char* nmea, int length);
- /** Callback to inform framework of the GPS engine's capabilities.告知GPS模块可以实现的功能
- * Capability parameter is a bit field of GPS_CAPABILITY_* flags.
- */
- typedef void (* gps_set_capabilities)(uint32_t capabilities);
- /** Callback utility for acquiring the GPS wakelock.上锁,防止处理GPS事件时中止。
- * This can be used to prevent the CPU from suspending while handling GPS events.
- */
- typedef void (* gps_acquire_wakelock)();
- /** Callback utility for releasing the GPS wakelock. */释放锁
- typedef void (* gps_release_wakelock)();
- /** Callback for creating a thread that can call into the Java framework code.等待上层请求
- * This must be used to create any threads that report events up to the framework.
- */
- typedef pthread_t (* gps_create_thread)(const char* name, void (*start)(void *), void* arg);
- /** GPS callback structure. */
- typedef struct {
- /** set to sizeof(GpsCallbacks) */
- size_t size;
- gps_location_callback location_cb;
- gps_status_callback status_cb;
- gps_sv_status_callback sv_status_cb;
- gps_nmea_callback nmea_cb;
- gps_set_capabilities set_capabilities_cb;
- gps_acquire_wakelock acquire_wakelock_cb;
- gps_release_wakelock release_wakelock_cb;
- gps_create_thread create_thread_cb;
- } GpsCallbacks;
-
GpsInterface
GPS接口是最重要的结构体,上层是通过此接口与硬件适配层交互的。
- /** Represents the standard GPS interface. */
- typedef struct {
- /** set to sizeof(GpsInterface) */
- size_t size;
- /**
- * Opens the interface and provides the callback routines
- * to the implemenation of this interface.
- */
- int (*init)( GpsCallbacks* callbacks );
- /** Starts navigating. 启动定位*/
- int (*start)( void );
- /** Stops navigating. 取消定位*/
- int (*stop)( void );
- /** Closes the interface. 关闭GPS接口*/
- void (*cleanup)( void );
- /** Injects the current time.填入时间 */
- int (*inject_time)(GpsUtcTime time, int64_t timeReference,
- int uncertainty);
- /** Injects current location from another location provider填入位置
- * (typically cell ID).
- * latitude and longitude are measured in degrees
- * expected accuracy is measured in meters
- */
- int (*inject_location)(double latitude, double longitude, float accuracy);
- /**
- * Specifies that the next call to start will not use the删除全部或部分辅助数据,在性能测试时使用
- * information defined in the flags. GPS_DELETE_ALL is passed for
- * a cold start.
- */
- void (*delete_aiding_data)(GpsAidingData flags);
- /**设置定位模式和GPS工作模式等
- * min_interval represents the time between fixes in milliseconds.
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 1131
1131











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











