







3D目标识别研究随着深度传感器的普及逐渐受到关注,本文主要介绍了到目前为止一些经典的三维局部特征描述方法,有些地方可能不够完善或错误解读,仅供读者参考了解。后续还会继续完善。
1. 3D识别的流程图

2. 局部特征描述子
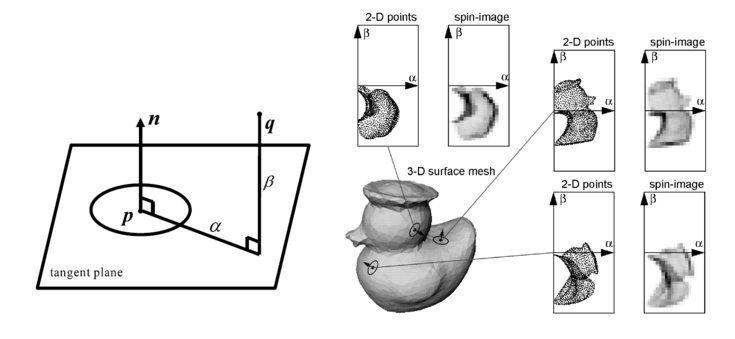
- Spin Image
统计的是在特征点局部圆柱坐标系下的领域点2D坐标分布直方图特征。如下图所示,圆柱坐标系由特征点p的法向量n以及切平面构成。点p的所有球形领域点q在圆柱坐标系下的坐标分布形成一个2D的Points分布图,然后离散化得到spin image。离散的过程会通过双线性插值的方式平滑每个点的作用,是的该描述子具有一定的抗噪声能力。最后得到的spin image 往往还需要一个归一化步骤,通过除以自旋图中最大的像素值得到,该步骤使得自旋图描述子具有一定的抗分辨率变化的能力。
不足:
a)坐标系依赖特征点的法向量,容易受噪声干扰;
b)没有考虑领域点的方位信息,使得特异性降低。
参考文献:
[1]Johnson AE, Hebert M (1999) Using spin images for efficient object recognition in cluttered 3D scenes. IEEE Transactions on Pattern Analysis and Machine Intelligence 21(5):433–449
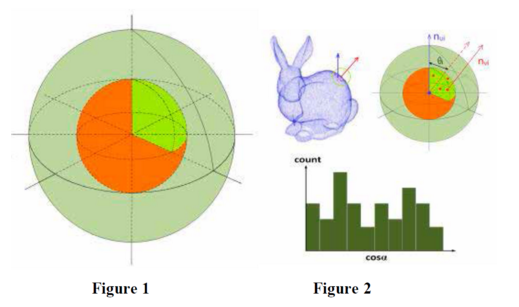
- SHOT(Signature of Histograms of OrienTations)
一种结合了几何分布信息以及直方图统计信息的鲁棒性,特异性描述子。具体的实现步骤如下:
step1: 根据特征点球邻域信息建立局部参考坐标系LRF,对特征点的球邻域分别沿径向(内外球)、经度(时区)和纬度方向(南北半球)进行区域划分。通常径向划分为2,经度划分为8,纬度划分为2,总共32个小区域。
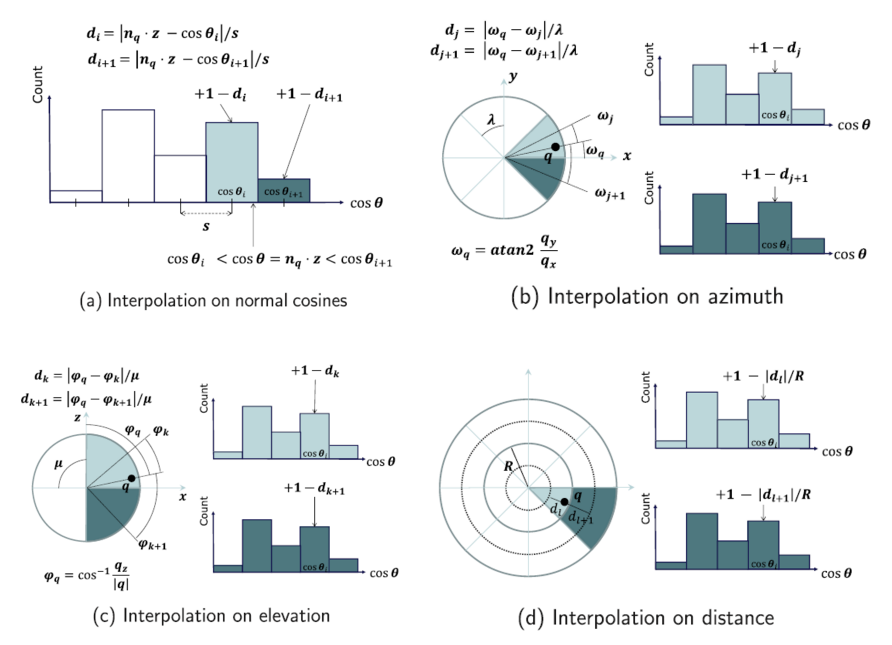
step2:分别统计每个小区域内的法向量夹角余弦值分布情况,法向量划分为11个bin。最终SHOT的长度为:32x11=352。
step2具体实现细节:采用双线性插值统计每个区域中的直方图特征
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 896
896

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









