







 Faster R-CNN通过引入Region Proposal Networks (RPNs) 实现了对Fast R-CNN的加速,解决了区域提案生成的效率问题。RPN是一种全卷积网络,通过在卷积特征图上滑动并生成objectness得分和边界框回归,以实现平移不变性的锚点采样。此外,通过交替优化共享卷积特征,Faster R-CNN提高了目标检测的速度和精度。
Faster R-CNN通过引入Region Proposal Networks (RPNs) 实现了对Fast R-CNN的加速,解决了区域提案生成的效率问题。RPN是一种全卷积网络,通过在卷积特征图上滑动并生成objectness得分和边界框回归,以实现平移不变性的锚点采样。此外,通过交替优化共享卷积特征,Faster R-CNN提高了目标检测的速度和精度。
文章: http://arxiv.org/abs/1506.01497
源码:坐等。。。。
目录:
首先,回顾下Fast R-CNN,与传统CNN不同的是,Fast R-CNN将图片送入网络时同时将multiple regions of interest (RoIs) 也送入网络,每一个RoI被pooled到一个固定大小的feature map,然后通过全连接将其映射到一个特征向量。每个RoI最终得到两个输出向量softmax probabilities 和 per-class bounding-box regression offsets。
Faster R-CNN 可以看做是对 Fast R-CNN 的进一步加速,最主要解决的如何快速获得 proposal,一般的做法都是利用显著性目标检测(如Selective search)过一遍待检测图,得到proposal。基于区域的深度卷积网络虽然使用了 GPU 进行加速,但是the region proposal methods 确却都是在 CPU上实现的,这就大大地拖慢了整个系统的速度。然后作者提出,卷积后的特征图同样也是可以用来生成 region proposals 的。通过增加两个卷积层来实现 Region Proposal Networks (RPNs) , 一个用来将每个特征图 的位置编码成一个向量,另一个则是对每一个位置输出一个 objectness score 和 regressed bounds for k region proposals。
RPNs 是一种 fully-convolutional network (FCN),为了与 Fast R-CNN 相结合,作者给出了一种简单的训练方法:固定 proposal, 为生成 proposal 和 目标检测 这两个task 交替微调网络 。
Region Proposal Networks
RPNs 从任意尺寸的图片中得到一系列的带有 objectness score 的 object proposals。具体流程是:使用一个小的网络在最后卷积得到的特征图上进行滑动扫描,这个滑动的网络每次与特征图上n*n 的窗口全连接,然后映射到一个低维向量,例如256D或512D, 最后将这个低维向量送入到两个全连接层,即box回归层(box-regression layer (reg))和box分类层(box-regression layer (reg))。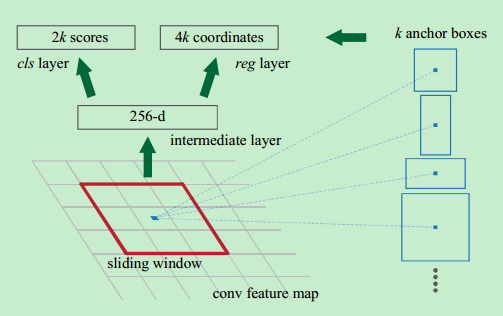
Translation-Invariant Anchors
这里作者说的平移不变性,其实就是以窗口中心进行多个尺度、宽高比的采样。如上图右边,文中使用了3 scales and 3 aspect ratios (1:1,1:2,2:1), 就产生了 k = 9 anchors at each sliding position. Anchors 这个词不知道应该怎么翻译,原文写的是:The k proposals are parameterized relative to k reference boxes, called anchors。
A Loss Function for Learning Region Proposals
作者将 anchors 分为两类:与 ground-truth box 有较高的 IoU 或 与任意一个 ground-truth box 的 IoU 大于0.7 的 anchor 都标为 positive label; 与 所有 ground-truth box 的IoU 都小于0.3的 anchor 都标为 negative label。其余非正非负的都被丢掉。
对于每一个 anchor box i, 其 loss function 定义为:
L(pi,ti)=Lcls(pi,p∗i)+λp∗
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 777
777

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









