







原文转自:http://blog.csdn.net/chenli2010/article/details/25204241
今天我们要谈论的文章为:
OverFeat: Integrated Recognition, Localization and Detection using Convolutional Networks. ICLR2014.
这是大牛Yann LeCun小组的文章。openreview中有下载链接和讨论:
引言:
对于分类问题而言,一个常用的增加训练样本的方法是将训练样本随机移动一个小的位移,或者,等价的,
在图像中随机取一些大的图像块。然后以这些图像块为输入训练分类模型。在测试阶段,可以采用滑窗的方法对
每一个图像块进行分类,然后组合这些分类结果,得到一个置信度更高的类别标签。这种技巧被广泛运用于机器
学习算法中,例如:
cuda-convnet库的wiki:https://code.google.com/p/cuda-convnet/wiki/TrainingNet
瑞士一个研究组的文章:Multi-column Deep Neural Networks for Image Classification. CVPR2012.
对于检测和定位问题,最自然(也是最常用的方法)就是采用滑窗对每一个图像块进行检测,从而确定目标
物体的位置。

以上解决分类、检测和定位的方法有一个共同的地方,就是需要一个滑窗对整幅图像进行密集采样,然后
处理每一个采样得到的图像块。传统的处理这些图像块的方法是一个接一个处理。但是,CNN有更便捷的做法。
文章内容:
CNN模型:
与Hinton小组的经典论文:ImageNet Classification with Deep Convolutional Neural Networks. NIPS2012.
结构一致。区别在于:a) 训练时输入大小固定,测试时用多尺度输入(具体方法见下文);b) 没有对比度归
一化;c) 采用没有overlap的max pooling;d) 前面两层的feature map的个数比上述论文中多。
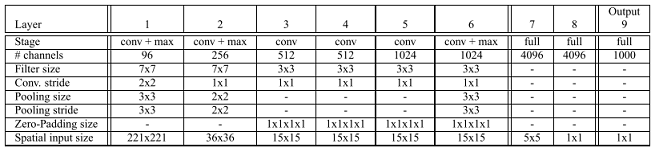
模型结构如上图所示。其中,1-5层为feature extraction layers,为三个任务(recognition、localization
和detection)共用的部分,6-9层为classifier layers。训练过程的一些参数为:min-batch的大小为128,
momentum = 0.6,weight decay = 1.0e-5,weight初始化为从(μ, σ) = (0, 0.01)的随机采样,等等。
密集采样(滑窗)支持:
对于一个训练好的CNN来说,CNN的结构(如CNN的层数、每一层feature map的个数,卷积层的kernel size
等等)是固定的,但是,每一层的feature map的大小是可以改变的。当测试样本和训练样本大小相同时,CNN
最后一层的每一个节点分别输出一个0~1的实数,代表测试样本属于某一类的概率;当测试样本比训练样本大时,
CNN最后一层每一个节点的输出为一个矩阵,矩阵中的每一个元素表示对应的图像块属于某一类的概率,其结果
相当于通过滑窗从图像中进行采样,然后分别对采样到的图像块进行操作:
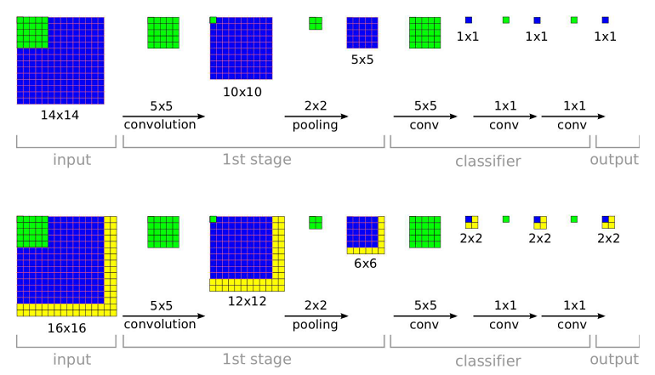
如上图所示,当输入图像为16x16时,output层的每一个节点输出为一个2x2的矩阵,相当于在原图像上
的四个角分别采样了一个14x14的图像块,然后分别对每一个图像块进行处理。
多尺度支持:
传统的检测/定位算法是固定输入图像不变,采用不同大小的滑窗来支持不同尺度的物体。对于CNN来说,
滑窗的大小就是训练时输入图像的大小,是不可以改变的。那么,CNN支持多尺度的办法就是,固定滑窗的大
小,改变输入图像的大小。具体来说,对于一幅给定的待处理的图像,将图像分别resize到对应的尺度上,然
后,在每一个尺度上执行上述的密集采样的算法,最后,将所有尺度上的结果combine起来,得到最终的结果。
然而,对于上文所述的密集采样算法来说,采样的间隔(也就是滑窗的stride)等于执行所有卷积和pooling
操作后图像缩小的倍数,也就是所有卷积层和pooling层的stride的乘积。如果这个值较大的话,采样就显得
sparse,图像中的某些位置就无法采样得到。这时,或者减小卷积层和pooling层的stride,或者干脆去掉某个
pooling层,或者采用某种方法替代某个pooling层。
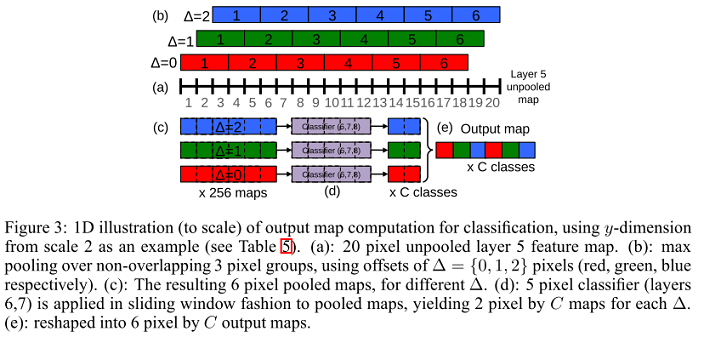
文章采用的方法如上图所示。对于stride=3的pooling层,先做常规的pooling(Δ=0),再往右移一格做
pooling(Δ=1),再往右移一格做pooling(Δ=2)。这样做的结果相当于,在相邻的两个滑窗的中间进行插值;也
可以理解为,将滑窗的stride减小了三分之一。这样,既实现了pooling操作,也减小了取样的间隔。
分类问题测试过程:
训练一个CNN并确定图像的六个尺度。给定一幅待识别的图像,先将图像resize到这六个不同的尺度,然后,
将这六种尺度的图像以及对它们进行水平翻转后的图像(总共12幅图像)送到CNN中,产生12个CNN输出的结果。
然后,对每一个CNN输出的结果进行空间域的非极大值抑制。(例如,对于一个类别数为1000的CNN来说,其输
出为1000个矩阵。第m个矩阵的位于(x, y)位置的元素表示点(x, y)对应的图像块属于类别m的概率。对这个输出结果
进行非极大值抑制,即对矩阵中所有元素求最大值。)然后,对于所有的非极大值抑制的结果(总共12个)按类别
求平均值,然后取均值的Top-1或者Top-5。
定位问题的模型和测试过程:
定位问题的模型也是一个CNN,1-5层作为特征提取层和分类问题完全一样,后面接两个全连接层,组成
regressor network。训练时,前面5层的参数由classification network给定,只需要训练后面的两个全连接层。这个
regressor network的输出就是一个bounding box,也就是说,如果将一幅图像或者一个图像块送到这个regressor
network中,那么,这个regressor network输出一个相对于这个图像或者图像块的区域,这个区域中包含感兴趣的
物体。这个regressor network的最后一层是class specific的,也就是说,对于每一个class,都需要训练单独最后一
层。这样,假设类别数有1000,则这个regressor network输出1000个bounding box,每一个bounding box对应一
类。
对于定位问题,测试时,在每一个尺度上同时运行classification network和regressor network。这样,对于每
一个尺度来说,classification network给出了图像块的类别的概率分布,regressor network进一步为每一类给出了
一个bounding box,这样,对于每一个bounding box,就有一个置信度与之对应。最后,综合这些信息,给出定位
结果。 (最近颇忙,后面的内容还是烦劳各位看论文吧。)














 1150
1150











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









