







第二篇 KinectV2结合opencv入门开发以及一些相关的学习资料
首先声明一下,本系统所使用的开发环境版本是计算机系统Windows 10、Visual Studio 2013、Opencv3.0和Kinect SDK v2.0。这些都可以在百度上找到,download下来安装一下即可。
一、开发环境配置
1.Visual Studio 2013安装
这个很简单没什么好说的,一直点下一步下一步就可以了,这里不再赘述。给出旗舰版下载链接http://download.microsoft.com/download/B/1/9/B1932B8C-1046-4773-A1DD-4AB5C0978637/vs2013.2_ult_chs.iso
还有版本秘钥,直接百度查找就会有,这里给出我当时用的: BWG7X-J98B3-W34RT-33B3R-JVYW9。
2.Opencv3.0安装
Opencv的全称是Open Source Computer Vision Library,是一个开源的跨平台计算机视觉库,把图像处理和计算机视觉方面的很多常用算法封装成API,方便开发者直接调用,可以运行当前主流的各种操作系统上。其官网:http://opencv.org
Opencv3.0的安装十分简单,只是环境配置相比其他软件有一丢丢麻烦。这里将分步演示每一步,包教包会。
你要记住你安装的路径。像本人的就是G:\Program Files\opencv3.0\opencv。第一步,配置环境变量。【计算机】-【(右键)属性】-【高级系统设置】-【环境变量】。如图
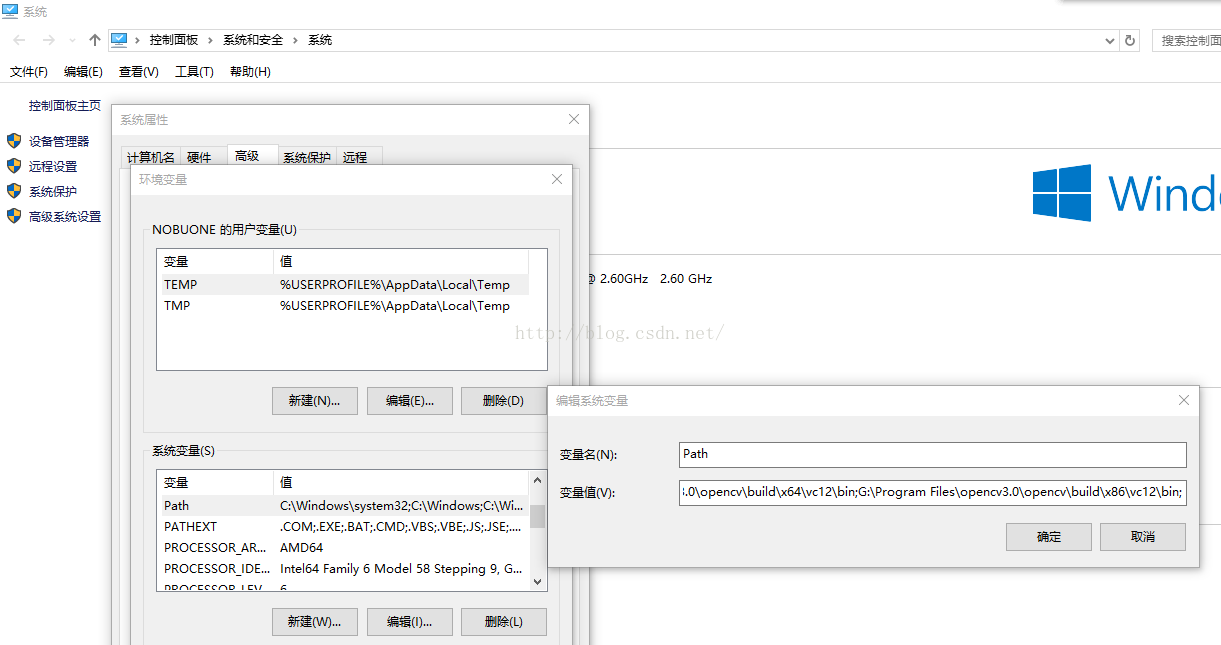
在path后面加一个英文分号,然后添加安装路径下的bin文件,包括X86和X64文件夹下的,像本人的就是这样的G:\Program Files\opencv3.0\opencv\build\x64\vc12\bin;G:\Program Files\opencv3.0\opencv\build\x86\vc12\bin;不同的安装路径添加到内容不一样,不要直接复制本文的,找到自己的安装路径。这样环境变量就配置好了。
温馨提示:环境变量配置好后一般需要重启电脑才会生效。
第二步,新建一个VS2013的控制台工程,添加一个空cpp源文件。在菜单栏有个【视图】-【其他窗口】-【属性管理器】。如图
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 2754
2754

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









