









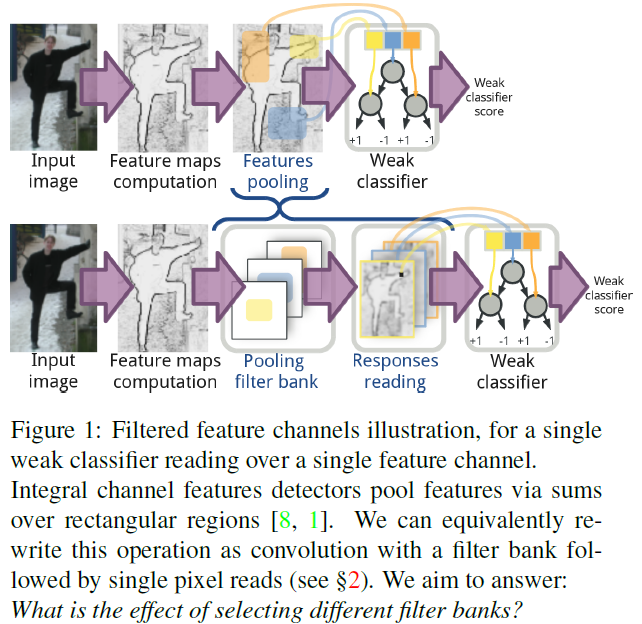
增加中间层,对底层特征使用滤波器组进行滤波,并使用boosted 决策树进行分类,可以提升行人检测率。最近比较好的人检测方法均在底层特征和分类器之间增加量中间层,如最大池化,滤波等。本文使用了滤波器组对图像进行卷积。文章提出的滤波器组框架如下图所示。仅使用HOG+LUV在Caltech和KITTI数据库上可获得最好的效果。
相关研究
最近的行人检测综述表明不同的分类器,如SVM和决策树,对检测结果影响不大,而使用何种特征显得更为重要。
不同的特征包括HOG,LBP,Colour,local structure,Covariance,使用CNN学习的特征,光流,深度图等。
目前最好的行人检测方法都是基于HOG+LUV方法(ChnFtrs)的扩展,包括SquaresChnFtrs,InformedHaar和LDCF。RegionLets在广义物体检测上的效果比较好。
FCF
ChnFtrs,SquaresChnFtrs,ACF均用了图1中上半部分的结构。输入图像转换为一系列特征图,通过对一大群矩形区域进行sum-pooling得到最终的特征向量。之后将特征送入决策树使用AdaBoost学习。树上的节点对特征值和学到的阈值进行简单的比较。通常决策树只学习了特征向量的子集。AdaBoost同时进行筛选特征和学习节点的阈值。
sum-pooling 可以使用滤波器族进行卷积,之后读取卷积响应图的单个值。这就是FCF。
基线方法包括ACF和InformedHaar。
参数:特征通道仅使用HOG+LUV,最终的分类器包括4096个2层的决策树,使用普通的离散AdaBoost,树通过穷举贪心搜索每个节点实现,模型大小为60*120像素,使用四轮难样本挖掘实现。滑动窗步长为6个像素。
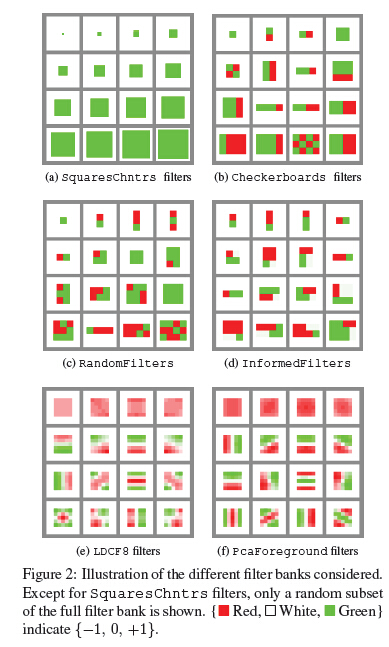
特征族介绍
InformedFilters,去除了InformedHaar中的位置限制,总共有212个滤波器,在10个通道上使用,等同于在2120个通道上训练决策树。对于60*120大小的模型,每个通道有200个特征(步长为6),总共得到2120*200个特征。AdaBoost筛选了其中的~3%。
Checkboards,滤波器大小与InformedHaar类似,滤波器数目与最大尺寸有关,4*4cell对应61个滤波器。
RandomFilters,给定滤波器数目和最大尺寸,根据均匀分布随机创建。
LDCF,使用学习到的PCA特征向量作为滤波器。
PcaForeground,LDCF使用所有训练数据学习滤波器,PcaForeground训练了8个滤波器,4个由背景图像学到,4个由行人块学到。
滤波器形状如下图所示:
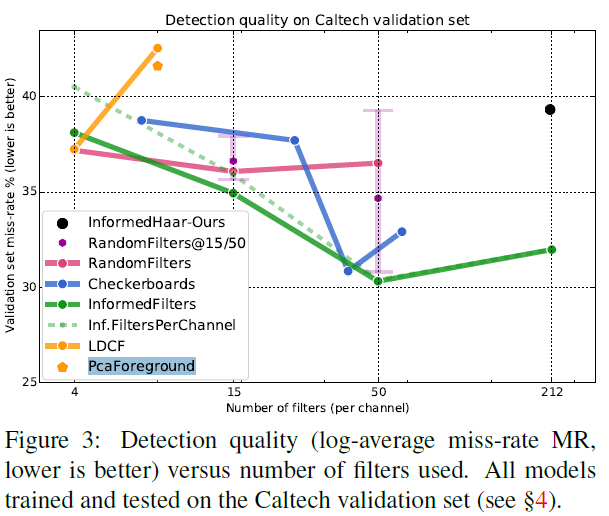
滤波器数目对结果的影响
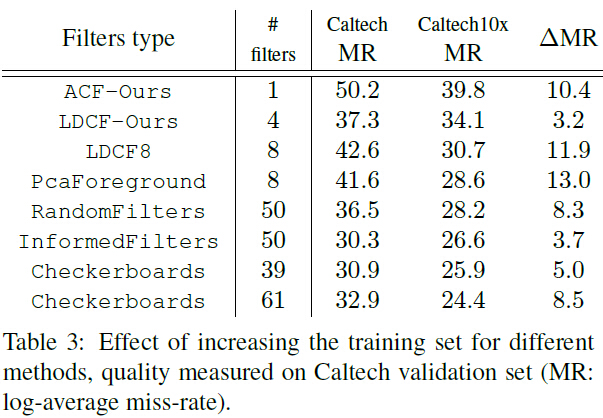
如下图所示,滤波器数目为50时MR最小,不同滤波器对结果影响不大。
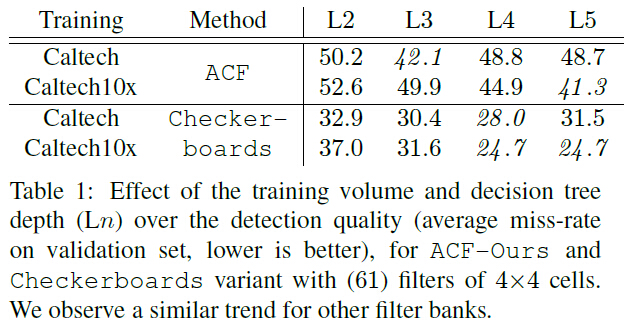
数据增加对结果的影响
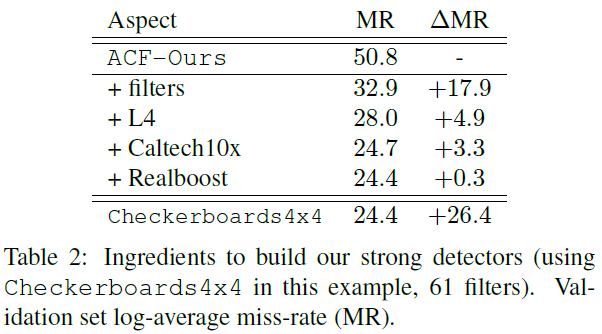
使用Caltech10x和更深层的决策树对结果的影响如下表,L4是甜点。
另外,使用RealAdaboost效果比discrete AdaBoost效果好,下表为不同要素对结果的影响
数据增加对不同方法结果的影响
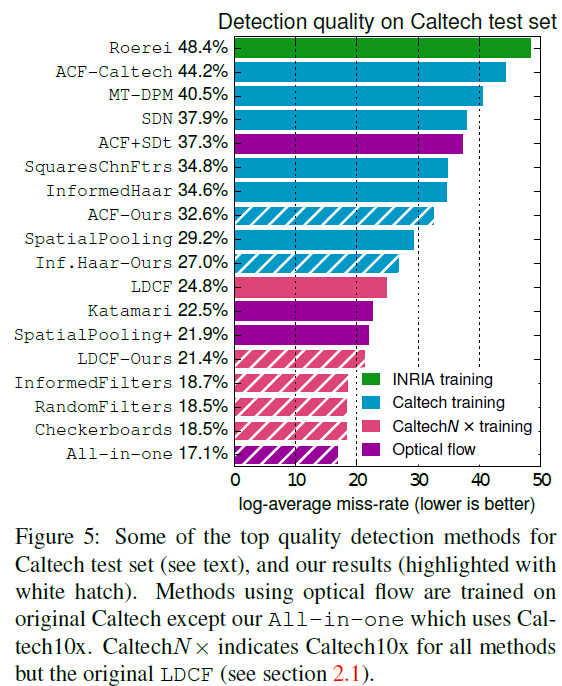
不同方法使用光流和训练数据增强对结果的影响















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









