






原理简述:
三维世界中的点的位置与其对应的二维投影,遵从以下公式:
其中,
M表示三维世界中的点;
[R|T]表示欧氏变换,是一个3*4矩阵
A表示相机参数矩阵,存放相机内部参数
P表示M在二维空间的投影,是一个二维点(文献1)。
相机成像投影图如下所示(文献2):
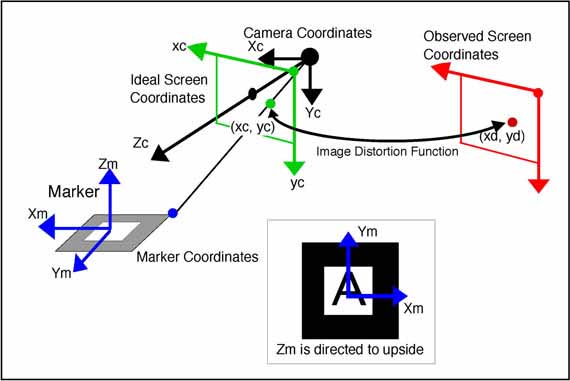
摄像机标定的过程就是找到相机内参,即:矩阵A
A通常为:
|afsx|

 博客详细介绍了基于opencv的摄像机标定原理和步骤,强调了标定过程中相机内参矩阵的构建,特别是焦距f的重要性。同时,指出了在后续程序中使用校正矩阵时的数据类型匹配问题,以避免计算错误。
博客详细介绍了基于opencv的摄像机标定原理和步骤,强调了标定过程中相机内参矩阵的构建,特别是焦距f的重要性。同时,指出了在后续程序中使用校正矩阵时的数据类型匹配问题,以避免计算错误。
三维世界中的点的位置与其对应的二维投影,遵从以下公式:
其中,
M表示三维世界中的点;
[R|T]表示欧氏变换,是一个3*4矩阵
A表示相机参数矩阵,存放相机内部参数
P表示M在二维空间的投影,是一个二维点(文献1)。
相机成像投影图如下所示(文献2):
摄像机标定的过程就是找到相机内参,即:矩阵A
A通常为:
|afsx|
 1226
1226

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章





















