







注意 ,本文基于JDK 1.8

HashMap#resize()
/**
* Initializes or doubles table size. If null, allocates in
* accord with initial capacity target held in field threshold.
* Otherwise, because we are using power-of-two expansion, the
* elements from each bin must either stay at same index, or move
* with a power of two offset in the new table.
*
* @return the table
*/
final Node<K,V>[] resize() {
Node<K,V>[] oldTab = table;
int oldCap = (oldTab == null) ? 0 : oldTab.length;
int oldThr = threshold;
int newCap, newThr = 0;
if (oldCap > 0) {
if (oldCap >= MAXIMUM_CAPACITY) {
threshold = Integer.MAX_VALUE;
return oldTab;
}
else if ((newCap = oldCap << 1) < MAXIMUM_CAPACITY &&
oldCap >= DEFAULT_INITIAL_CAPACITY)
newThr = oldThr << 1; // double threshold
}
else if (oldThr > 0) // initial capacity was placed in threshold
newCap = oldThr;
else { // zero initial threshold signifies using defaults
newCap = DEFAULT_INITIAL_CAPACITY;
newThr = (int)(DEFAULT_LOAD_FACTOR * DEFAULT_INITIAL_CAPACITY);
}
if (newThr == 0) {
float ft = (float)newCap * loadFactor;
newThr = (newCap < MAXIMUM_CAPACITY && ft < (float)MAXIMUM_CAPACITY ?
(int)ft : Integer.MAX_VALUE);
}
threshold = newThr;
@SuppressWarnings({"rawtypes","unchecked"})
Node<K,V>[] newTab = (Node<K,V>[])new Node[newCap];
table = newTab;
if (oldTab != null) {
for (int j = 0; j < oldCap; ++j) {
Node<K,V> e;
if ((e = oldTab[j]) != null) {
oldTab[j] = null;
if (e.next == null)
newTab[e.hash & (newCap - 1)] = e;
else if (e instanceof TreeNode)
((TreeNode<K,V>)e).split(this, newTab, j, oldCap);
else { // preserve order
Node<K,V> loHead = null, loTail = null;
Node<K,V> hiHead = null, hiTail = null;
Node<K,V> next;
do {
next = e.next;
if ((e.hash & oldCap) == 0) {
if (loTail == null)
loHead = e;
else
loTail.next = e;
loTail = e;
}
else {
if (hiTail == null)
hiHead = e;
else
hiTail.next = e;
hiTail = e;
}
} while ((e = next) != null);
if (loTail != null) {
loTail.next = null;
newTab[j] = loHead;
}
if (hiTail != null) {
hiTail.next = null;
newTab[j + oldCap] = hiHead;
}
}
}
}
}
return newTab;
}注释翻译
Initializes or doubles table size. If null, allocates in accord with initial capacity target held in field threshold.Otherwise, because we are using power-of-two expansion, the elements from each bin must either stay at same index, or move with a power of two offset in the new table.
初始化或者翻倍表大小。如果表为null,则根据存放在threshold变量中的初始化capacity的值来分配table内存(这个注释说的很清楚,在实例化HashMap时,capacity其实是存放在了成员变量threshold中,注意,HashMap中没有capacity这个成员变量)。如果表不为null,由于我们使用2的幂来扩容,则每个bin元素要么还是在原来的bucket中,要么在2的幂中。
下面一步一步解析这个代码
newCap与newThr
Node<K,V>[] oldTab = table;
int oldCap = (oldTab == null) ? 0 : oldTab.length;
int oldThr = threshold;
int newCap, newThr = 0;
if (oldCap > 0) {
if (oldCap >= MAXIMUM_CAPACITY) {
threshold = Integer.MAX_VALUE;
return oldTab;
}
else if ((newCap = oldCap << 1) < MAXIMUM_CAPACITY &&
oldCap >= DEFAULT_INITIAL_CAPACITY)
newThr = oldThr << 1; // double threshold
}
else if (oldThr > 0) // initial capacity was placed in threshold
newCap = oldThr;
else { // zero initial threshold signifies using defaults
newCap = DEFAULT_INITIAL_CAPACITY;
newThr = (int)(DEFAULT_LOAD_FACTOR * DEFAULT_INITIAL_CAPACITY);
}
if (newThr == 0) {
float ft = (float)newCap * loadFactor;
newThr = (newCap < MAXIMUM_CAPACITY && ft < (float)MAXIMUM_CAPACITY ?
(int)ft : Integer.MAX_VALUE);
}
threshold = newThr;如果oldTab != null,则oldCap>=0:
如果此时oldCap>=MAXIMUM_CAPACITY,表示已经到了最大容量,这时还要往map中放数据,则阈值设置为整数的最大值 Integer.MAX_VALUE,直接返回这个oldTab的内存地址。
如果此时oldCap< MAXIMUM_CAPACITY,表示还没到达最大容量:
如果进行扩容之后newCap < MAXIMUM_CAPACITY 并且 oldCap的初始化值大于等于DEFAULT_INITIAL_CAPACITY(16),这时可以直接将阈值也扩大1倍。因为threshold=capacity*loadFactor,capacity变成原来的2倍,则threshold也要变成原来的2倍。
如果oldTab==null,则oldCap=0:
如果oldThr>0:表示在实例化HashMap时,调用了HashMap的带参构造方法,初始化了threshold,这时将阈值赋值给newCap,因为在构造方法 中是将capacity赋值给了threshold。
如果oldThre <= 0:表示实例化HashMap是,调用的是HashMap的默认构造方法,则newCap和newThr都使用默认值。
这时要判断newThr是否等于0?newThr等于0表示,
else if ((newCap = oldCap << 1) < MAXIMUM_CAPACITY &&
>= DEFAULT_INITIAL_CAPACITY)
newThr = oldThr << 1; // double thresholdoldCap>0,这一步判断失败,有可能是扩容后大于了MAXIMUM_CAPACITY,也有可能oldCap小于DEFAULT_INITIAL_CAPACITY导致的。
和oldCap
else if (oldThr > 0) // initial capacity was placed in threshold
newCap = oldThr;判断成功,oldThr大于0。
然后根据newCap和loadFactor确定newThr。有可能这时newCap已经大于MAXIMUM_CAPACITY了,则将thresHold设置为最大的整数,否则直接使用计算得来的新的newThr。
下面就是分配内存,如果oldTab == null,则 返回newTab。
如果oldTab != null,则需要将原内存地址中的数据拷贝给newTab的地址。
下标的变化
例如我们从16扩展为32时,具体的变化如下所示:

其中n即表示容量capacity。resize之后,因为n变为2倍,那么n-1的mask范围在高位多1bit(红色),因此新的index就会发生这样的变化:

因此,我们在扩充HashMap的时候,不需要重新计算hash,只需要看看原来的hash值新增的那个bit是1还是0就好了,是0的话索引没变,是1的话索引变成“原索引+oldCap”。可以看看下图为16扩充为32的resize示意图:
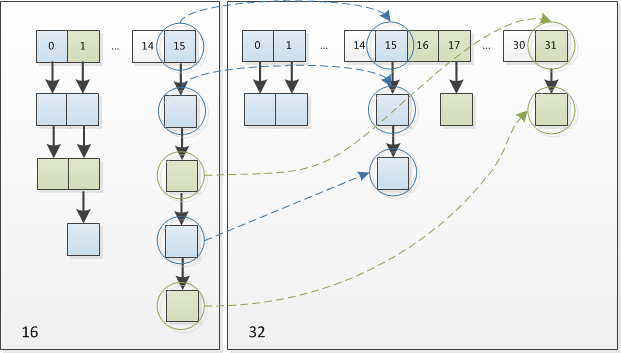
这个设计确实非常的巧妙,既省去了重新计算hash值的时间,而且同时,由于新增的1bit是0还是1可以认为是随机的,因此resize的过程,均匀的把之前的冲突的节点分散到新的bucket了。
在链表中进行操作时,使用的是尾插法。















 237
237

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









