







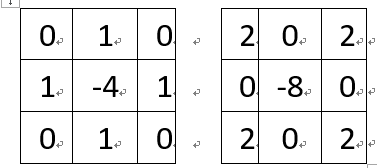
拉普拉斯算子(Laplacian)可应用到图像边缘检测中。在OpenCV中当kernel大小为3*3时,支持两种kernel算子,分别为:
在OpenCV中默认的计算方式如下,假设有一个5*5的小图像,原始值依次为1,2,…25,如下图红色部分,首先将5*5映射到(5+3-1)*(5+3-1)大小,然后和3*3的kernel做累积和,因为计算结果有可能超出有效值[0, 255]范围,因此在最终还需要判断使其在有效范围内,即小于0为0,大于255为255:
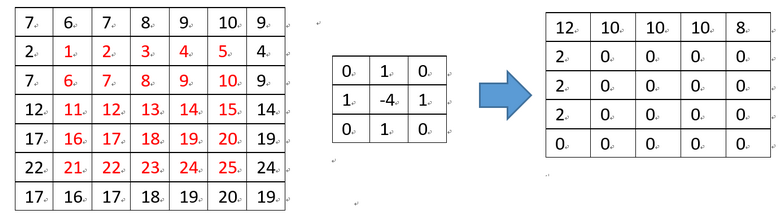
如坐标为(0,0)的计算过程为:12 = 7*0+6*1+7*0+2*1+1*(-4)+2*1+7*0+6*1+7*0.
以下code分别采用两种方式实现,一种是从OpenCV中提取的code(Laplacian_函数),一种是按照上面说明的方式实现的(Laplacian函数),两种方式实现的结果完全一致,但第二种方式更容易理解:
laplacian.cpp:
#include "funset.hpp"
#include <limits.h>
#include <chrono>
#include <vector>
#include <algorithm>
#include <memory>
#include "common.hpp"
namespace {
typedef struct Rect {
int x, y, width, height;
} Rect;
typedef struct Size {
int width, height;
} Size;
typedef struct Point {
int x, y;
} Point;
int borderInterpolate(int p, int len)
{
if ((unsigned)p < (unsigned)len) {
;
} else {
if (len == 1) return 0;
int delta = 1;
do {
if (p < 0) p = -p - 1 + delta;
else p = len - 1 - (p - len) - delta;
} while ((unsigned)p >= (unsigned)len);
}
return p;
}
inline unsigned char saturate_cast(float v)
{
int iv = (int)(v + (v >= 0 ? 0.5f : -0.5f));
return (unsigned char)((unsigned)v <= UCHAR_MAX ? v : v > 0 ? UCHAR_MAX : 0);
}
void filter2D(const unsigned char** src, unsigned char* dst, int dststep, int count, int width, int ksize)
{
std::vector<Point> coords;
std::vector<float> coeffs;
if (ksize == 1) {
coords = { { 1, 0 }, { 0, 1 }, { 1, 1 }, { 2, 1 }, { 1, 2 } }; // kernel non zero position: (x, y)
coeffs = { 1.f, 1.f, -4.f, 1.f, 1.f }; // kernel non zero value: 1, 1, -4, 1, 1
} else {
coords = { { 0, 0 }, { 2, 0 }, { 1, 1 }, { 0, 2 }, { 2, 2 } }; // kernel non zero position: (x, y)
coeffs = { 2.f, 2.f, -8.f, 2.f, 2.f }; // kernel non zero value: 2, 2, -8, 2, 2
}
std::vector<unsigned char*> ptrs(coords.size());
float _delta{ 0.f };
const Point* pt = &coords[0];
const float* kf = (const float*)&coeffs[0];
const unsigned char** kp = (const unsigned char**)&ptrs[0];
int nz = (int)coords.size();
for (; count > 0; count--, dst += dststep, src++) {
unsigned char* D = (unsigned char*)dst;
for (int k = 0; k < nz; k++)
kp[k] = (const unsigned char*)src[pt[k].y] + pt[k].x;
for (int i = 0; i < width; i++) {
float s0 = _delta;
for (int k = 0; k < nz; k++)
s0 += kf[k] * kp[k][i];
D[i] = saturate_cast(s0);
}
}
}
int Laplacian_(const unsigned char* src_, unsigned char* dst_, int width_, int height_, int ksize_)
{
const unsigned char* src = src_;
unsigned char* dst = dst_;
const Size ksize{ 3, 3 };
const int maxBufRows = ksize.height + 3;
const Point anchor{ 1, 1 };
const Rect roi{ 0, 0, width_, height_ };
const int dx1{ 1 }, dx2{ 1 };
int borderLength = std::max(ksize.width - 1, 1);
std::vector<int> borderTab(borderLength);
borderTab[0] = borderInterpolate(-dx1, width_);
borderTab[1] = borderInterpolate(width_, width_);
std::vector<unsigned char*> rows(maxBufRows);
const int* btab = &borderTab[0];
int srcstep{ width_ }, dststep{ width_ };
std::vector<unsigned char> ringBuf((width_ + ksize.width - 1) * maxBufRows, 0);
int bufStep{ width_ + ksize.width - 1 };
int startY = std::max(roi.y - anchor.y, 0), startY0 = startY, rowCount{ 0 }, dstY{ 0 };
int endY = std::min(roi.y + roi.height + ksize.height - anchor.y - 1, height_);
int esz = 1;
unsigned char** brows = &rows[0];
int bufRows = (int)rows.size();
int kwidth = ksize.width;
int kheight = ksize.height, ay = anchor.y;
int _dx1 = dx1, _dx2 = dx2;
int width1 = roi.width + kwidth - 1;
int dy = 0, i = 0;
int count = endY - startY;
for (;; dst += dststep * i, dy += i) {
int dcount = bufRows - ay - startY - rowCount + roi.y;
dcount = dcount > 0 ? dcount : bufRows - kheight + 1;
dcount = std::min(dcount, count);
count -= dcount;
for (; dcount-- > 0; src += srcstep) {
int bi = (startY - startY0 + rowCount) % bufRows;
unsigned char* brow = &ringBuf[0] + bi*bufStep;
unsigned char* row = brow;
if (++rowCount > bufRows) {
--rowCount;
++startY;
}
memcpy(row + _dx1*esz, src, (width1 - _dx2 - _dx1)*esz);
for (i = 0; i < _dx1*esz; i++)
row[i] = src[btab[i]];
for (i = 0; i < _dx2*esz; i++)
row[i + (width1 - _dx2)*esz] = src[btab[i + _dx1*esz]];
}
int max_i = std::min(bufRows, roi.height - (dstY + dy) + (kheight - 1));
for (i = 0; i < max_i; i++) {
int srcY = borderInterpolate(dstY + dy + i + roi.y - ay, height_);
if (srcY < startY) return -1;
if (srcY >= startY + rowCount) break;
int bi = (srcY - startY0) % bufRows;
brows[i] = &ringBuf[0] + bi*bufStep;
}
if (i < kheight) break;
i -= kheight - 1;
filter2D((const unsigned char**)brows, dst, dststep, i, roi.width, ksize_);
}
dstY += dy;
if (dstY > roi.height) return -1;
return 0;
}
int Laplacian(const unsigned char* src_, unsigned char* dst_, int width_, int height_, int ksize_)
{
const int kernel_size{ 3 };
std::vector<float> kernel;
if (ksize_ == 1) kernel = { 0.f, 1.f, 0.f, 1.f, -4.f, 1.f, 0.f, 1.f, 0.f };
else kernel = { 2.f, 0.f, 2.f, 0.f, -8.f, 0.f, 2.f, 0.f, 2.f };
int new_width = width_ + kernel_size - 1, new_height = height_ + kernel_size - 1;
std::unique_ptr<unsigned char[]> data(new unsigned char[new_width * new_height]);
unsigned char* p = data.get();
for (int y = 0; y < new_height; ++y) {
if (y != 0 && y != new_height - 1) {
for (int x = 0; x < new_width; ++x) {
if (x == 0) {
p[y * new_width + x] = src_[(y - 1) * width_ + 1];
} else if (x == new_width - 1) {
p[y * new_width + x] = src_[(y - 1) * width_ + (width_ - 1 - 1)];
} else {
p[y * new_width + x] = src_[(y - 1) * width_ + (x - 1)];
}
}
}
if (y == new_height - 1) {
for (int x = 0; x < new_width; ++x) {
p[y * new_width + x] = p[(y - 2) * new_width + x];
}
for (int x = 0; x < new_width; ++x) { // y = 0
p[x] = p[2 * new_width + x];
}
}
}
for (int y = 1; y < new_height - 1; ++y) {
for (int x = 1; x < new_width - 1; ++x) {
float value{ 0.f };
int count{ 0 };
for (int m = -1; m <= 1; ++m) {
for (int n = -1; n <= 1; ++n) {
value += p[(y + m) * new_width + (x + n)] * kernel[count++];
}
}
if (value < 0.) dst_[(y - 1) * width_ + (x - 1)] = 0;
else if (value > 255.) dst_[(y - 1) * width_ + (x - 1)] = 255;
else dst_[(y - 1) * width_ + (x - 1)] = static_cast<unsigned char>(value);
}
}
return 0;
}
} // namespace
int laplacian_cpu(const unsigned char* src, int width, int height, int ksize, unsigned char* dst, float* elapsed_time)
{
int ret{ -1 };
// ksize == 1: kernel={ 0, 1, 0, 1, -4, 1, 0, 1, 0 }
// ksize == 3: kernel={ 2, 0, 2, 0, -8, 0, 2, 0, 2 }
CHECK(ksize == 1 || ksize == 3);
//TIME_START_CPU
ret = Laplacian(src, dst, width, height, ksize);
//TIME_END_CPU
return ret;
}#include "funset.hpp"
#include <random>
#include <iostream>
#include <vector>
#include <memory>
#include <string>
#include <algorithm>
#include "common.hpp"
int test_image_process_laplacian()
{
cv::Mat src = cv::imread("E:/GitCode/CUDA_Test/test_data/images/lena.png", 0);
if (!src.data || src.channels() != 1) {
fprintf(stderr, "read image fail\n");
return -1;
}
int width{ 400 }, height{ 400 };
cv::resize(src, src, cv::Size(width, height));
std::unique_ptr<unsigned char[]> data1(new unsigned char[width * height]), data2(new unsigned char[width * height]);
float elapsed_time1{ 0.f }, elapsed_time2{ 0.f }; // milliseconds
int ksize{ 1 };
CHECK(laplacian_cpu(src.data, width, height, ksize, data1.get(), &elapsed_time1) == 0);
//CHECK(laplacian_gpu(src.data, width, height, data2.get(), &elapsed_time2) == 0);
//fprintf(stdout, "gray image edge detection: laplacian: cpu run time: %f ms, gpu run time: %f ms\n", elapsed_time1, elapsed_time2);
cv::Mat dst;
cv::Laplacian(src, dst, src.depth(), ksize);
cv::imwrite("E:/GitCode/CUDA_Test/test_data/images/laplacian.png", dst);
CHECK(compare_result(data1.get(), dst.data, width*height) == 0);
//CHECK(compare_result(data1.get(), data2.get(), width*height) == 0);
save_image(src, dst, width, height / 2, "E:/GitCode/CUDA_Test/test_data/images/laplacian_result.png");
return 0;
}
















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









