





 本文详细描述了一位博主如何自主设计并利用3D打印技术制作双足机器人的全过程,包括材料选择、设计思路、组装步骤及学习收获。通过此方案,博主不仅深入理解了机器人原理,还提升了设计和实践能力。
本文详细描述了一位博主如何自主设计并利用3D打印技术制作双足机器人的全过程,包括材料选择、设计思路、组装步骤及学习收获。通过此方案,博主不仅深入理解了机器人原理,还提升了设计和实践能力。
本文的原文连接是: http://blog.csdn.net/freewebsys/article/details/49474219 未经博主允许不得转载。
博主地址是:http://blog.csdn.net/freewebsys
1,关于双足机器人
研究这个比较难,之前组装了小车。感觉不过瘾,所以要选择一个比较难的。
对双足机器人兴趣比较大。
首先要讲讲robo-one,一个日本(不谈政治)双足机器人比赛,2003年就开始了。
http://www.robo-one.com/

机器人比赛:


京东上面有关于双足机器人的书籍。

里面介绍的全部都是双足机器人。
书上讲的是日本的情况,而且robo-one的比赛是使用遥控器的。
比赛的目的是击败对方。要求单腿离地,5秒钟走10步。
ROBO-ONE决赛 GAROO获得两连冠
http://v.youku.com/v_show/id_XMzcxNDMzNDA0.html
2,材料
已经确定双足机器人的主要材料要使用舵机。因为扭力大,控制简单。
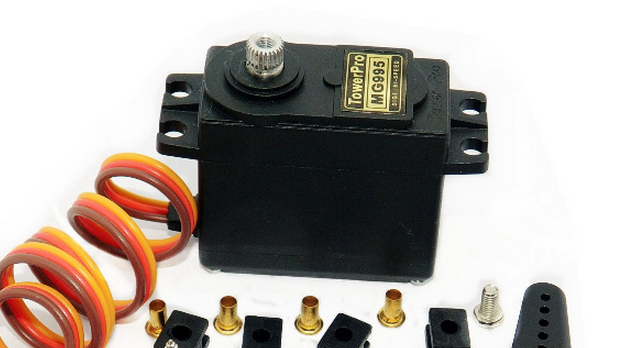
首先要购买便宜好用的舵机。
国产的只能选择盛辉舵机了。扭力比较大,价格比较便宜。
淘宝搜索一大堆,真假分不清,比较混乱。
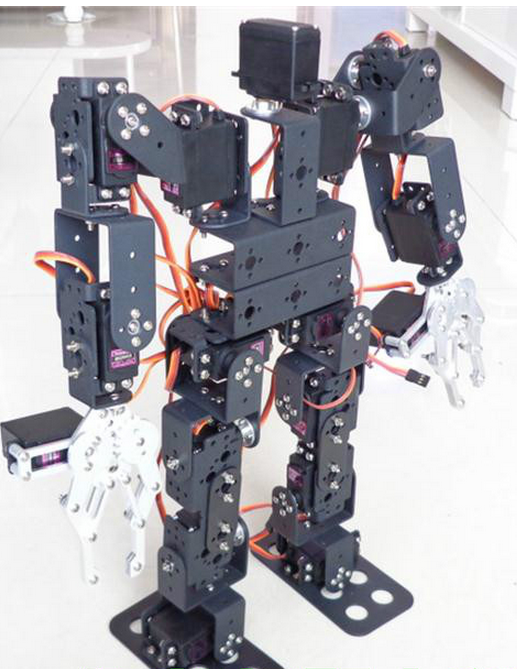
然后需要购买舵机支架,也不便宜,几块钱一个,要组装起来两条腿也需要100 多块钱。

最后组装成一个真正的铁家伙,和这个类似吧。
3,没有挑战
这样仅仅从淘宝上面就能直接购买零件,组装成一个机器人,然后自己在用树莓派开发程序。
但是这样感觉不是在做机器人,没用挑战,使用的是现成的支架。
一点设计感都没有,只是增加了动手能力,和组装小车没用啥区别。
所以我决定换一个新方案。
4,新方案
只购买基础材料,舵机,螺丝等。
然后使用cad软件自己设计机器人腿。设计螺丝孔,设计形状。
然后使用3D打印机打印零件,再组装。
这样可以学到更多知识,搞清楚机器人的原理。
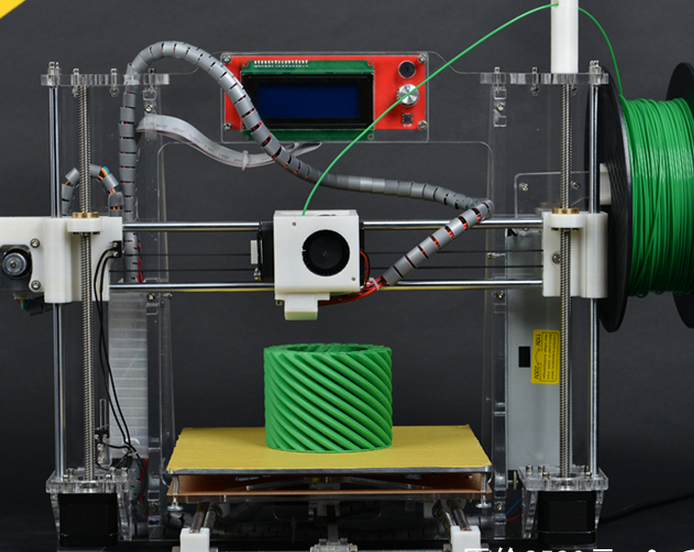
因为3D打印技术的发展,可以买到很便宜的打印机了。
而且,之前研究的国外的开源机器人项目也是使用3D打印的,可以参考下。
使用树莓派进进行控制。
5,总结
本文的原文连接是: http://blog.csdn.net/freewebsys/article/details/49474219 未经博主允许不得转载。
博主地址是:http://blog.csdn.net/freewebsys
开发一个双足机器人,难度非常大,好多东西都需要学习。
但是这样才锻炼人,选择一个自己非常刚兴趣的东西研究,非常高兴。
我的目标不是竞赛,不是完成作业,我是要自己开发一个机器人。
过程是我的乐趣,而不是结果。
有志同道合的童鞋可以继续关注我的博客。

















 2402
2402

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









