







今天介绍一下深度图像的获取方法主要有哪些,以及这些方法会导致深度图像中存在什么样的问题。
在计算机视觉系统中,三维场景信息为图像分割、目标检测、物体跟踪等各类计算机视觉应用提供了更多的可能性,而深度图像(Depth map)作为一种普遍的三维场景信息表达方式得到了广泛的应用。深度图像的每个像素点的灰度值可用于表征场景中某一点距离摄像机的远近。
获取深度图像的方法可以分为两类:被动测距传感和主动深度传感。
In short:深度图像的像素值反映场景中物体到相机的距离,获取深度图像的方法=被动测距传感+主动深度传感。
被动测距传感
被动测距传感中最常用的方法是双目立体视觉[1,2],该方法通过两个相隔一定距离的摄像机同时获取同一场景的两幅图像,通过立体匹配算法找到两幅图像中对应的像素点,随后根据三角原理计算出时差信息,而视差信息通过转换可用于表征场景中物体的深度信息。基于立体匹配算法,还可通过拍摄同一场景下不同角度的一组图像来获得该场景的深度图像。除此之外,场景深度信息还可以通过对图像的光度特征[3]、明暗特征[4]等特征进行分析间接估算得到。
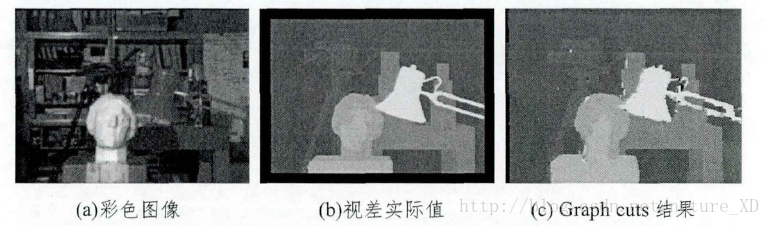
上图展示了Middlebury Stereo Dataset中Tsukuba场景的彩色图像、视差实际值与用Graph cuts算法得到的立体匹配误差估计结果,该视差图像可以用于表征场景中物体的三维信息。
可以看到,通过立体匹配算法得到的视差图虽然可以得到场景的大致三维信息,但是部分像素点的时差存在较大误差。双目立体视觉获得视差图像的方法受限于基线长度以及左右图像间像素点的匹配精确度,其所获得的视差图像的范围与精度存在一定的限制。
In short,
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









