










题目大意:
给出一张有向完全图(也就是竞赛图),要求求出一条哈密顿路径。
分析:
假设我们当前已经构造出了前n个点的哈密顿路径,存在ans数组中,我们接下来要向这条路径中加入第n+1个点,那么合法的加入分为三种情况:
第一种情况:
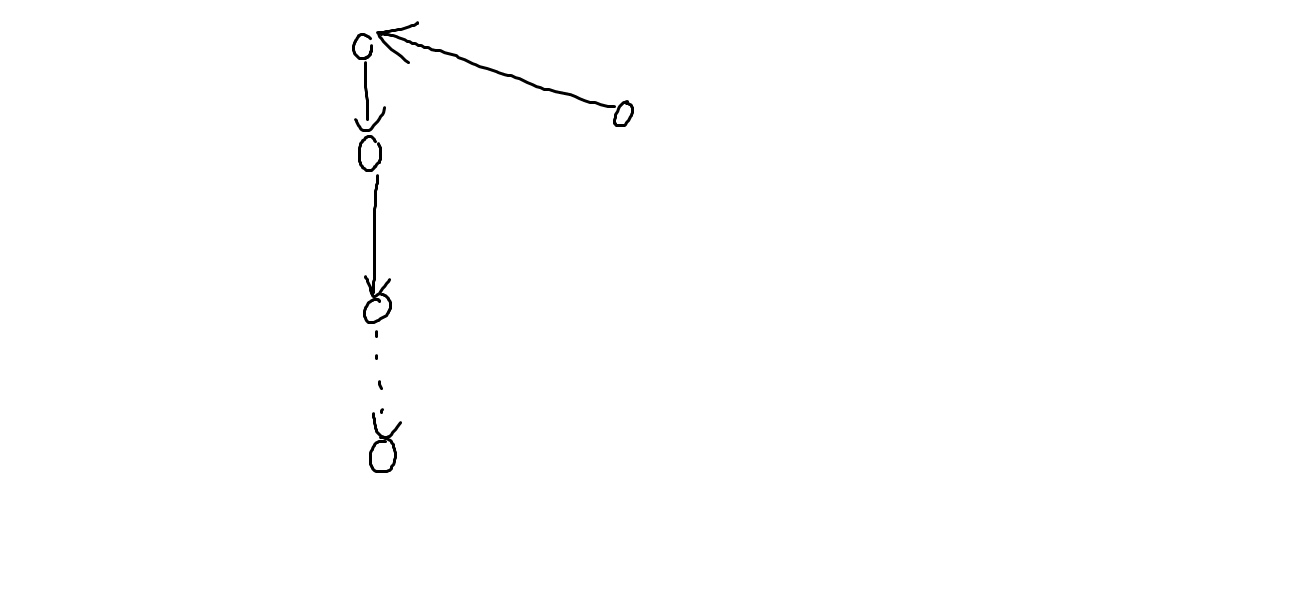
(简单易懂,不再赘述)
第二种情况:
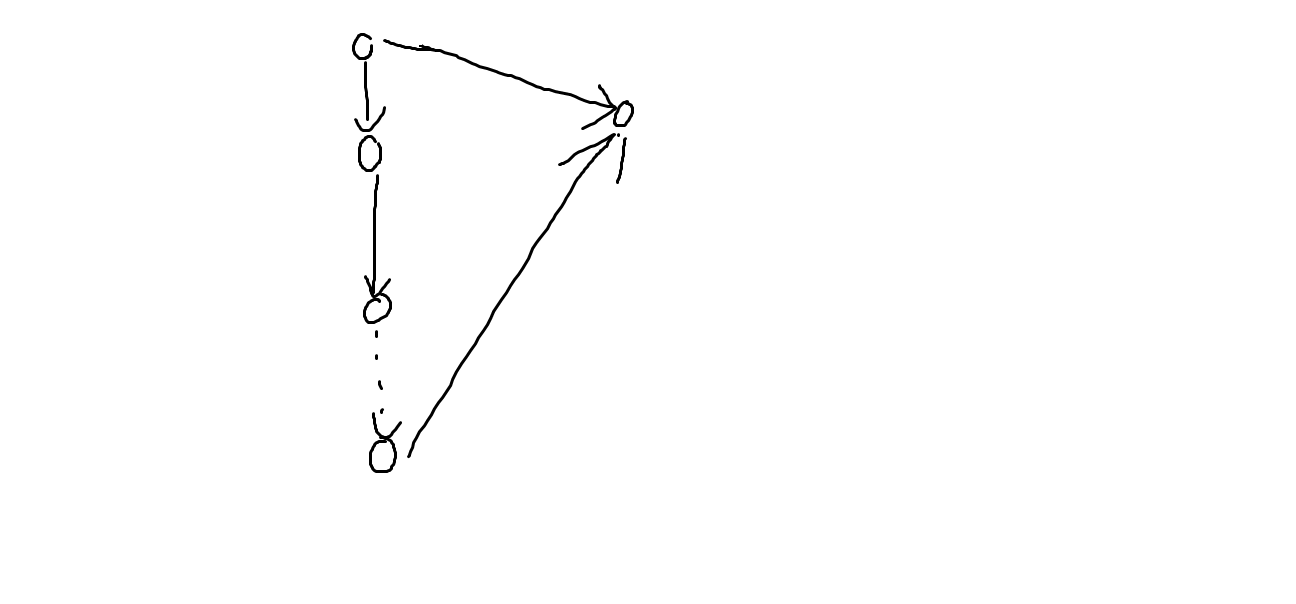
(同样简单易懂,加到最后即可)
第三种情况:
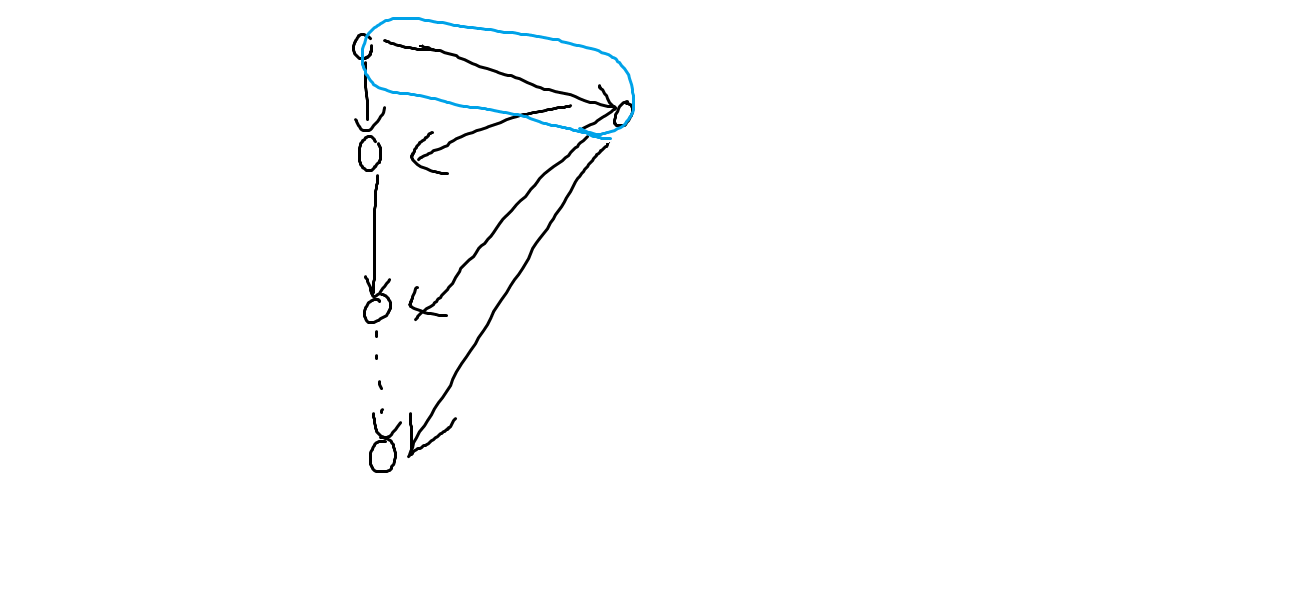
(一定存在至少一条边指向第n+1个点,这样的话,只要把第n+1个点加在这个指向它的点的后面就好啦)
代码如下:
#include<algorithm>
#include<iostream>
#include<cstring>
#include<cstdio>
//by NeighThorn
using namespace std;
const int maxn=1000+5;
int n,mp[maxn][maxn],ans[maxn];
inline int read(void){
char ch=getchar();int f=1,x=0;
while(!(ch>='0'&&ch<='9')){
if(ch=='-')f=-1;
ch=getchar();
}
while(ch>='0'&&ch<='9')
x=x*10+ch-'0',ch=getchar();
return f*x;
}
signed main(void){
while(scanf("%d",&n)!=EOF){
for(int i=1;i<=n;i++)
for(int j=1;j<=n;j++)
mp[i][j]=read();
for(int i=1;i<=n;i++){
int tmp=1;
for(int j=i-1;j>=1;j--){
if(j==1&&mp[i][ans[1]]==1){
tmp=1;
break;
}
else if(j==i-1&&mp[ans[j]][i]==1){
tmp=i;
break;
}
else
if(mp[ans[j]][i]==1){
tmp=j+1;
break;
}
}
for(int j=i;j>tmp;j--)
ans[j]=ans[j-1];
ans[tmp]=i;
}
printf("1\n%d\n",n);
for(int i=1;i<=n;i++)
printf("%d ",ans[i]);
puts("");
}
return 0;
}by >_< NeighThorn















 284
284











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









