




 本文介绍了如何使用代码模拟摆动的球体,通过计算而非动画实现。首先回顾了物理学中的能量转换原理,然后详细阐述了绘制带绳球体的过程,包括确定球心坐标、绘制球体和绳子。接着,讲解了如何通过改变角度让球体旋转,并模拟现实中的摆动速度变化。最后提供了全部代码实现。
本文介绍了如何使用代码模拟摆动的球体,通过计算而非动画实现。首先回顾了物理学中的能量转换原理,然后详细阐述了绘制带绳球体的过程,包括确定球心坐标、绘制球体和绳子。接着,讲解了如何通过改变角度让球体旋转,并模拟现实中的摆动速度变化。最后提供了全部代码实现。
导语
首先,看一下效果

可能各位在别处看到过类似的东西,我在微信的文章末尾看到有个玩意,感觉有意思,就用代码实现一下。这篇文章主要把握写代码的思路展示一下。
看到上图,我想各位能想到最简单的实现方案就是用动画,切很多图出来,然后就可以轻松实现了。为了不让自己再舒适区里呆的太安逸,就弄点麻烦的:通过计算来实现。文章的末尾会将全部代码贴出,复制可以直接运行。
需要回忆的知识
- 重力势能 E = mgh
- 动能 E = ½mv²
- 在理想状态下,动能和重力式能可以相互转换,且能量守恒
如果不想太注意细节,以上的知识可以忽略
绘制流程
绘制5个带绳子的球
这步非常简单,概括来说就是:
- 确定球的圆心坐标O
- 画固定长度的线段OA
- 以点O为圆心,画固定半径的球(这样就完成了一个带绳的球)
- 绘制多个带绳的球
相关代码在文章末尾已经贴出来了(82-124行,代码中有后续的细节处理,需要甄别下相关的代码),这里只是写下思路,不再重复贴代码了
让球旋转
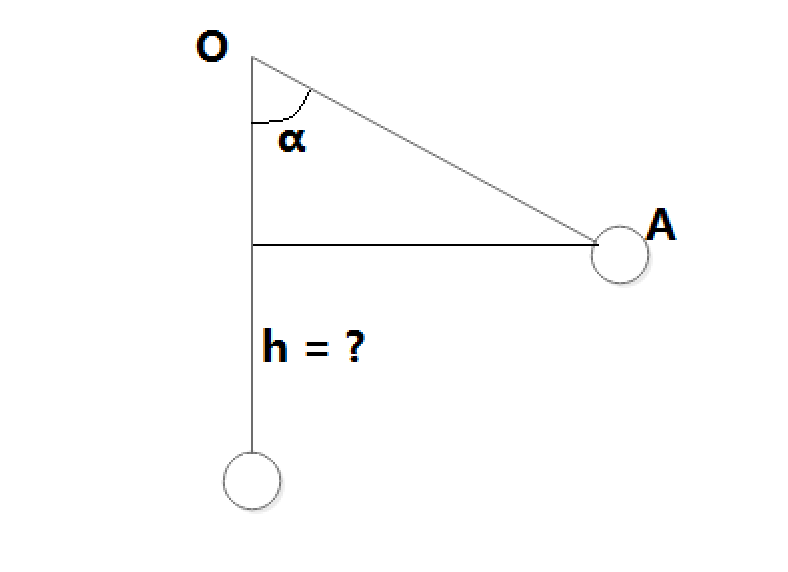
静态图为:
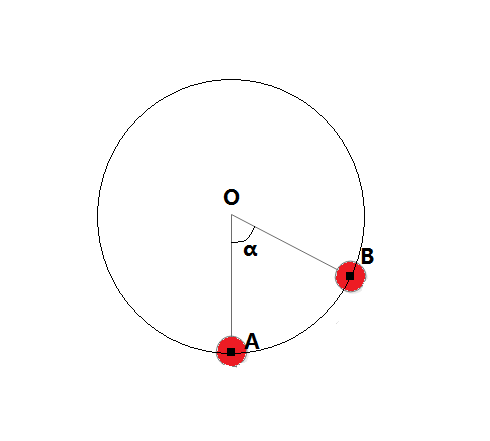
让带绳子的球旋转,实际上就是改变上图的角α;当α越大,偏移的角度越大;当α越小,偏移的角度越小。
为了让计算简单,先假设一些前提:
- α的最大值为45°(这里可以自由给值)
- 每次刷新屏幕α改变的值的大小一致且为1(也就是调用invalidate()方法)
- 一开始α为45°
有了这些前提限制,实际上,每一次绘图我们的已知条件为:
- O点的坐标
- 大圆的半径 = 绳子的长度 + 小圆的半径
- α的值(因为前提中的2和3,绘制的时候是可以知道当前α的角度)
所以,这步的大致流程为:
- 根据大圆的圆心O、半径R,当前α的角度,求B点的坐标(跟前一篇类似,通过画弧,再通过PathMeasure.getPosTan()来获得相应点的坐标)
- 绘制线段OB
- 以B点为圆心,画半径为固定值的小圆
相关代码在文章末尾已经贴出来了(131-224行,代码中有后续的细节处理,需要甄别下相关的代码),这里只是写下思路,不再重复贴代码了
如果第一步不知道如何去测量B点的坐标,建议先去看下我前两篇的文章
音量调节
绘制仪表盘
模拟现实
在上一步中,我们为了简化模型,让α的改变量每次都为1,但是,这与现实不相符。现实情况是这样的:
- 球偏移到最高点时,速度很慢,基本上为0
- 球偏移到最低点,速度最快

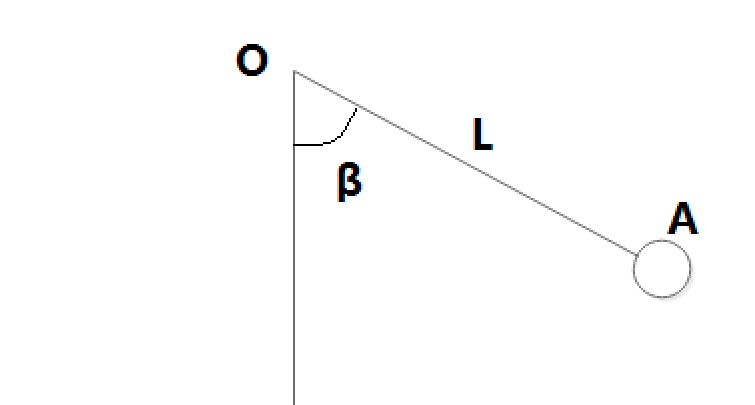
文章一开始,我们已经准备好了需要回忆的知识,现在,让我们回到物理学课堂,说一说简单的摆钟模型计算:

条件:绳子的长为L,球A静止时,竖直方向的夹角为α
求:当与竖直方向的夹角为β时的角速度
解题步骤
- 求总机械能
当球静止时,机械能 = 重力势能
- 一般情况的表示
当球运动时,机械能 = 重力势能 + 动能
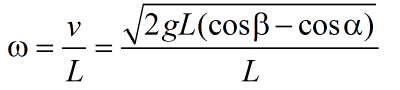
经过计算可以得到:
又有公式:
所以最终的结果为



回归到代码中
好了,得出了结论,让我们回到代码中来:
//计算当前的速率
float v = (float) Math.sqrt(2 * 9.8 * L * (Math.cos( β* Math.PI / 180) - cos(α* Math.PI / 180)));
//计算角速度
float w = v / L;说明:这里只是拟合,并没有特别精确。我们认为当前角度到改变后的角度之间的角速度是一致的,都为当前角度所对应的角速度;所以,在当前角度下,改变角度的量为:
具体的实现过程在下面代码的243-250行,是不是感觉很简单?
全部代码
上面罗里吧嗦的半天,终于给出来了可以复制的东西 O(∩_∩)O~
/**
* Created by kevin on 2016/9/2.
* <p>
* 需要推敲的地方:
* 1.并排绘制多个带绳子的球
* 2.让左右两端的球可以旋转
* 3.为了模拟现实,需要根据物理学来计算单位时间旋转的角度
*/
public class Pendulum extends View {
private Paint linePaint;
private int width;
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 440
440










 到【灌水乐园】发言
到【灌水乐园】发言







