







这次作业真的是 ……虽然最后写出的代码没多少行,但是很烧脑,需要用到很多高中的几何数学知识(差不多忘光了_(:зゝ∠)_)和一些算法。然后最后写完发现有些方法挺巧妙的,所以在这里分享一下。
……虽然最后写出的代码没多少行,但是很烧脑,需要用到很多高中的几何数学知识(差不多忘光了_(:зゝ∠)_)和一些算法。然后最后写完发现有些方法挺巧妙的,所以在这里分享一下。
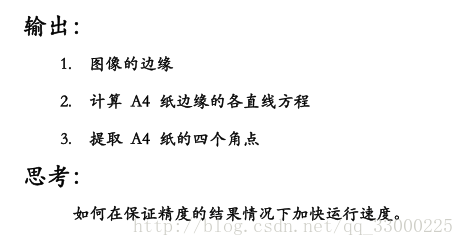
先把作业要求放上来吧:
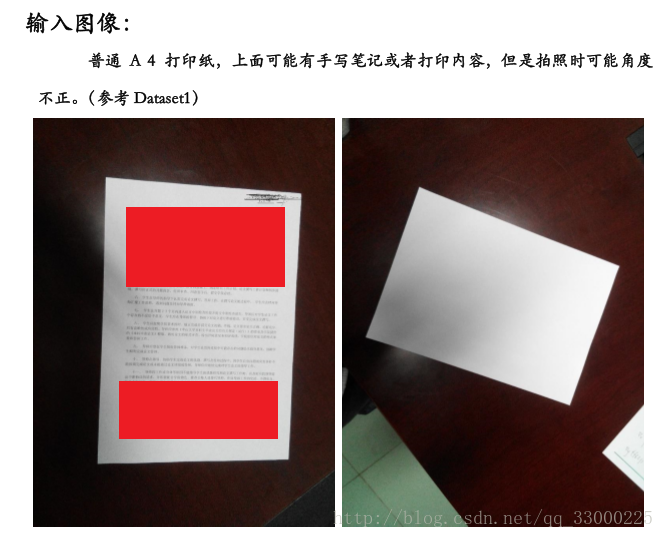
(输入图像的红色部分仅为马赛克处理哈,原输入图像不存在)
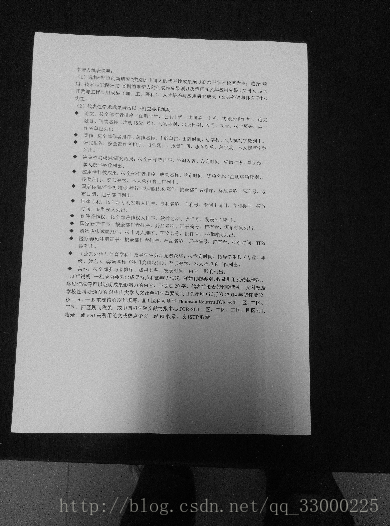
好,那接下来po一下做出的效果图:
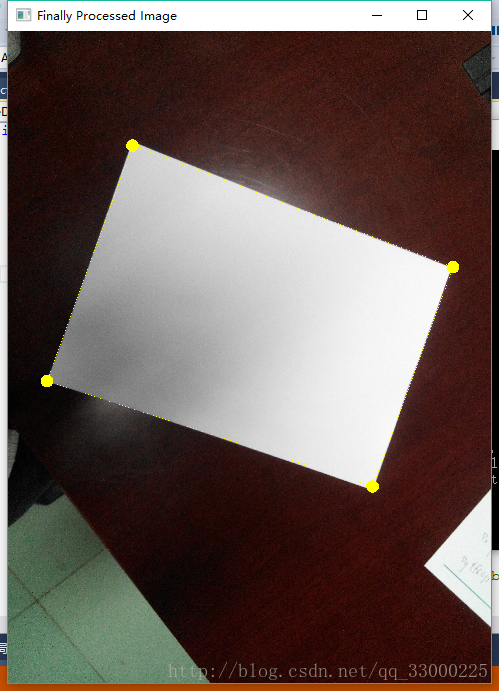

(边缘有点细_(:зゝ∠)_,得仔细看才能看出。用时也给出来了,四舍五入后 1张图片的处理到最后显示只用9秒。)
为什么提了时间呢?因为上面也提到了,输入图像的分辨率大得感人啊 不做点处理都不知道跑到什么时候才能跑出结果。好了,下面会先大概说一下整个处理的所有步骤,接着会有每个步骤的详细解释。
不做点处理都不知道跑到什么时候才能跑出结果。好了,下面会先大概说一下整个处理的所有步骤,接着会有每个步骤的详细解释。
处理步骤:
1、先对输入图像进行灰度化处理,再按一定比例下采样(即对图像插值压缩)
2、利用上一次作业的Canny算法提取边缘(得到的边缘有噪点且不完整)
3、对ImageSpace做HoughSpace(极坐标)变换,并做voting投票(矩阵累加)
4、对累加矩阵取最大的一些值,得到边缘直线的斜率、截距,并画出边缘直线
5、求每两条直线之间交点,并累计该交点的直线交叉次数
6、取交叉次数最多的4个点,即为A4纸的四个顶点
7、把顶点坐标上采样并放回原图,最后4个顶点之间连线,形成边缘
步骤详细解释:
1、先对输入图像进行灰度化处理,再按一定比例下采样(即对图像插值压缩):
(1)灰度化处理:这个不用详细说了,都是数字图像的处理方法。灰度转化公式I = r * 0.299 + g * 0.587 + b * 0.114。
(2)下采样:由于原图是3120*4208的分辨率,刚好都是8的倍数,所以我通过插值将宽高都变成原来的1/8,即390*526。插值方法网上很多教程啦,自己找下吧
@问题@:为什么可以进行下采样?会有精度丢失吗?
@回答@:(这纯属我个人理解哈)首先,做下采样肯定是为了提高减少运行时间啦,上面也提到了处理分辨率如此高的一张图片最后只用了9 秒。而说到精度,精度丢失肯定会有的啦~~只是可以设想一下,如果原来边缘在图像的高度的1/4处,那我不管怎么放大缩小,那边缘还是在图像的高度的1/4处啊~~从上面的处理结果来看,其实效果我觉得还是可以的,虽然有一定误差,但是应该在可以接受的范围吧_(:зゝ∠)_
步骤1结果(这步骤都是简单的图像处理,所以就不放代码啦~~):
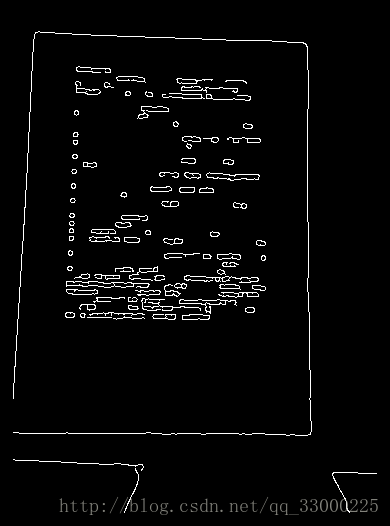
2、利用上一次作业的Canny算法提取边缘(得到的边缘有噪点且不完整):
我上次的作业改的code0的代码啊。400多行,就不放上来了_(:зゝ∠)_ 改一下那份代码就能用了。
步骤2结果:
3、对ImageSpace做HoughSpace(极坐标)变换,并做voting投票
课件上有介绍直接的Hough坐标变化b = -x * m + y(不用极坐标),但是输入图像的很多直线的截距b都特别大(最大的接近1w),这样的累加矩阵就会很大很大!所以我用了极坐标控制矩阵大小。变换及几何意义如下:

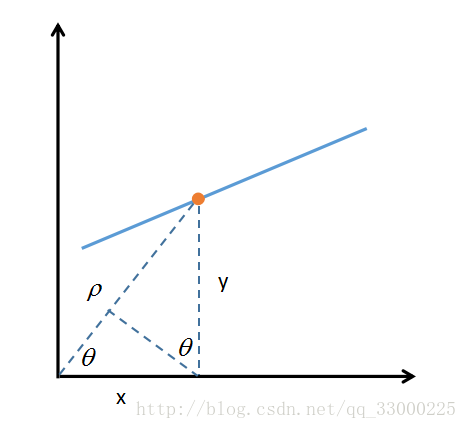
好了,有了这些几何知识就可以编码了。先声明一个累加矩阵:360 * ((x + y) * 2)。宽360是360度,高原来又平方又开方太复杂了,所以直接用更大(可接受范围)的矩阵,乘2倍,是把负的部分平移上来可以累加。
然后编码思路:先在canny提取的边缘图像上,对于边缘点得到x、y。然后在Hough空间,对每一个θ,由x、y计算出ρ:
void HoughEdgeDetect::HoughTransAndDetectEdge() {
cimg_forXY(SrcCannyImg, x, y) {
if (SrcCannyImg(x, y, 0) == 255) {
//cout << "(" << x << ", " << y << ")" << endl;
accumulateTheHoughArray(x, y);
}
}
//......
}
void HoughEdgeDetect::accumulateTheHoughArray(int x, int y) {
for (int i = 0; i < 360; i++) {
double theta = (double)i * Pi / 180.0;
int rho = (int)round(sin(theta) * (double)y + cos(theta) * (double)x);
if (rho < imgW + imgH) {
houghArray[(rho + imgW + imgH) / RhoScale][i]++;
//cout << "houghArray[" << (rho + imgW + imgH) / RhoScale << "][" << i << "] = "
// << houghArray[(rho + imgW + imgH) / RhoScale][i] << endl;
}
}
}步骤3结果:Hough空间的局部图像:
4、对累加矩阵取最大的一些值,得到边缘直线的斜率、截距,并画出边缘直线
由刚得到的累加矩阵,原理上累计最多的4个点即为A4纸四条边的θ、ρ参数,但实际不然,会发现同一条边会有多组累计数都很高的参数(下面结果图可见),即前4个累计最多的点不能反映4条边。因此我在实验中一直调到取前12个点才能把所有图像的4条边都检测出来_(:зゝ∠)_:
(1)这里需要从一堆数据中找到前topK个数,并获取其在数组里的坐标。这可比找一堆数据中的最大值复杂好多_(:зゝ∠)_。我是用了最小堆来实现:当前堆里topK个数的最小值放堆顶,当检测到比堆顶大的数,去掉堆顶的值,然后把刚检测到的数插入堆。
(2)同时声明两个存储斜率k和截距b的数组。当在堆里插入累加值时,根据其θ、ρ参数可以求出k、b值。接着找到在堆里插入的位置,然后在数组里插入改k、b值。
//找线交叉最多的TopK个θ、ρ参数对
void HoughEdgeDetect::findTheTopKParaPair() {
for (int i = 0; i < (imgW + imgH) * 2 / RhoScale; i++) {
for (int j = 0; j < 360; j++) {
if (houghArray[i][j] != 0) {
if (myHeap.size() < TopK) { //堆里不够TopK个数,直接插入
myHeap.insert(houghArray[i][j]);
modifyTheParaArray(i, j);
}
else { //堆里够了TopK个数,若检测到比堆顶大的数,先移除堆顶元素再插入
IntHeap::iterator pIter = myHeap.begin();
if (houghArray[i][j] > *pIter) {
myHeap.erase(pIter);
myHeap.insert(houghArray[i][j]);
modifyTheParaArray(i, j);
}
}
}
}
}
}
//根据θ、ρ参数获得b、m并插入数组
void HoughEdgeDetect::modifyTheParaArray(int i, int j) {
int index = 0;
IntHeap::iterator tIter = myHeap.begin();
//先获取在堆里插入的位置index
while (tIter != myHeap.end()) {
if (*tIter == houghArray[i][j]) {
break;
}
tIter++;
index++;
}
for (int k = 0; k < index; k++) {
k_TopList[k] = k_TopList[k + 1];
b_TopList[k] = b_TopList[k + 1];
}
k_TopList[index] = -1.0 / tan((double)j * Pi / 180.0);
b_TopList[index] = (double)(i * RhoScale - imgW - imgH) / sin((double)j * Pi / 180.0);
}画出边缘直线:
CImg<int> HoughEdgeDetect::getCannyGrayImageWithEdge() {
CImg<int> answer = CImg<int>(SrcCannyImg._width, SrcCannyImg._height, 1, 3, 0);
cimg_forXY(answer, x, y) {
answer(x, y, 0) = SrcCannyImg(x, y, 0);
answer(x, y, 1) = SrcCannyImg(x, y, 0);
answer(x, y, 2) = SrcCannyImg(x, y, 0);
}
const double yellow[] = { 255, 255, 0 };
const double green[] = { 0, 255, 255 };
const double red[] = { 255, 0, 0 };
const double purple[] = { 255, 0, 255 };
for (int i = 0; i < TopK; i++) {
double k = k_TopList[i];
double b = b_TopList[i];
//cout << "k = " << k << " , b = " << b << endl;
//根据斜率、截距得到在图像区域内的两个点,然后画直线
if (abs(k) < 1) {
if (i >= TopK - 4)
answer.draw_line(0, (int)round(b), imgW, (int)(round((double)imgW * k + b)), green);
else
answer.draw_line(0, (int)round(b), imgW, (int)(round((double)imgW * k + b)), purple);
}
else { //abs(k) >= 1
if (i >= TopK - 4)
answer.draw_line((int)round(-b / k), 0, (int)round(((double)imgH - b) / k), imgH, green);
else
answer.draw_line((int)round(-b / k), 0, (int)round(((double)imgH - b) / k), imgH, purple);
}
}
return answer;
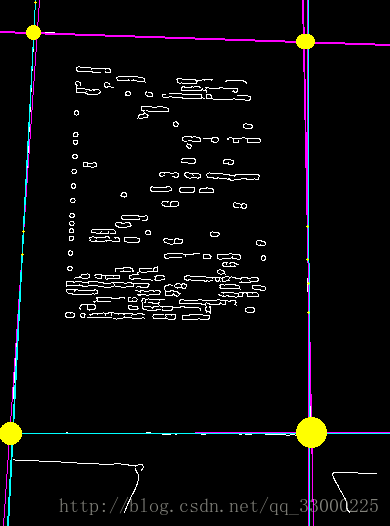
}步骤4结果:
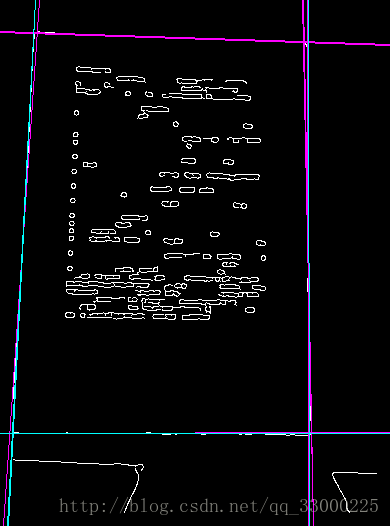
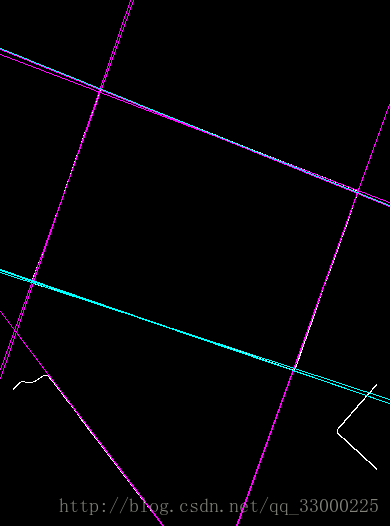
(可以看到边缘会有很多条直线经过,特意标注蓝色为累计数最多的4条直线,可以看到这4条直线中甚至有2-3条都过同一个边缘)
5、求每两条直线之间交点,并累计该交点的直线交叉次数:
可以从步骤4结果看到,基本边缘都出来了。但是!!! 右边的结果图很明显有一条无关的直线!回到原图看,那原来是桌子边缘!(这真的是坑!要咋整啊_(:зゝ∠)_)
然而办法还是有的!我们可以仔细看下上面右边的图,4个边缘的直线一般都是有多条直线经过,而那条多余的线貌似只有一条。那也就是说:当有另外一条线与真实边缘线 or 多余的那条直线相交时,交点区域(即多个交点集中的区域)内的点的个数肯定是真实边缘线的比多余线的多!(貌似有点难理解_(:зゝ∠)_)那接下来就用代码证实!
(1)找两条直线的交点:利用高中数学知识,可以根据两对k、b得到两直线的交点。同时我们需要检测交点是否在图像区域内。
(2)有可能某个交点就在另一交点的附近(比如相差一个像素),此情况下我们把两个点看做同一个点,即需要合并,并累加两次。
(此部分代码与下一部分有合并,因此在下一部分给出)
步骤5结果:
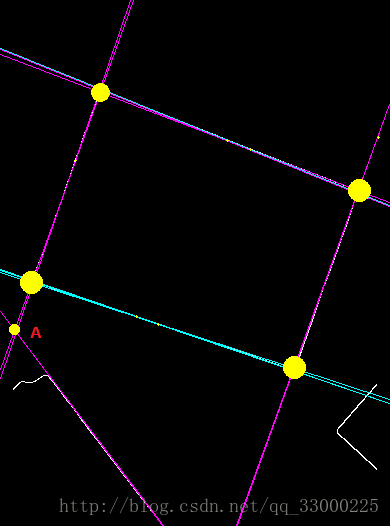
分析:代码里,点的大小与交点的直线交叉数成正比。所以可以很明显看出,右图中A交点明显比另外4个点小,也就是直线交叉数 比其他点少,即说明了我们上面的推论。
6、取交叉次数最多的4个点,即为A4纸的四个顶点
有了步骤5,我们就好做了。步骤5已经得到所有的交点集。此时我们只需找到交叉数最多的4个点即可!
struct Vertex {
int x;
int y;
int crossTimes = 0;
Vertex(int posX, int posY): x(posX), y(posY) {}
void setXY(int _x, int _y) {
x = _x;
y = _y;
}
void addCrossTimes() {
crossTimes++;
}
};
void HoughEdgeDetect::findTheNearest4Points() {
//先对每个交点做相交次数累加
for (int i = 0; i < TopK; i++) {
double k1 = k_TopList[i];
double b1 = b_TopList[i];
for (int j = 0; j < TopK; j++) {
if (i != j) {
double k2 = k_TopList[j];
double b2 = b_TopList[j];
getValidCrossPointAndIncrement(k1, b1, k2, b2);
}
}
}
//找相交次数最多的4个点
int max = 0;
int maxUnder = -1;
while (top4vertexSet.size() < 4) {
max = 0;
for (int i = 0; i < vertexSet.size(); i++) {
if (vertexSet[i].crossTimes > max) {
max = vertexSet[i].crossTimes;
maxUnder = i;
}
}
top4vertexSet.push_back(vertexSet[maxUnder]);
vertexSet[maxUnder].crossTimes = -1;
}
}
//根据两条直线的斜率、截距获取交点,检测是否在图像区域内
//对交点做交叉次数做累加
void HoughEdgeDetect::getValidCrossPointAndIncrement(double k1, double b1, double k2, double b2) {
double xd = (b2 - b1) / (k1 - k2);
int x = (int)round(xd);
int y = (int)round(xd * k1 + b1);
if (x >= 0 && x <= imgW && y >= 0 && y <= imgH) { //在图像区域内
int i = 0;
for (i = 0; i < vertexSet.size(); i++) {
int oldX = vertexSet[i].x;
int oldY = vertexSet[i].y;
//附近有特别靠近的点,可以合并
if ((oldX - x) * (oldX - x) + (oldY - y) * (oldY - y) <= VertexGap) {
vertexSet[i].addCrossTimes();
break;
}
}
if (i == vertexSet.size()) { //如果该点附近没有距离特别近的点,自身作为一个新点
Vertex newVertex(x, y);
vertexSet.push_back(newVertex);
}
}
}对4个交点画圆(由于画点draw_point只能是一个像素,看不清,所以画圆):
//相交次数最多的4个点,描出来
for (int i = 0; i < top4vertexSet.size(); i++) {
answer.draw_circle(top4vertexSet[i].x, top4vertexSet[i].y, 5, yellow, 1.0f);
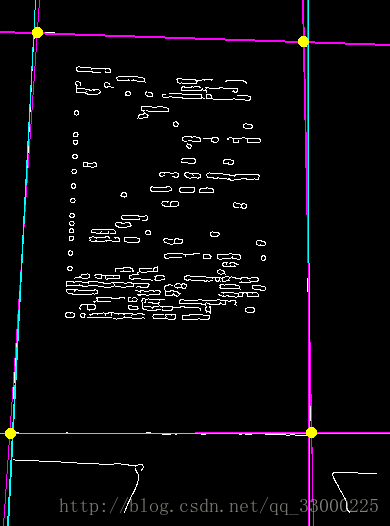
}步骤6结果:
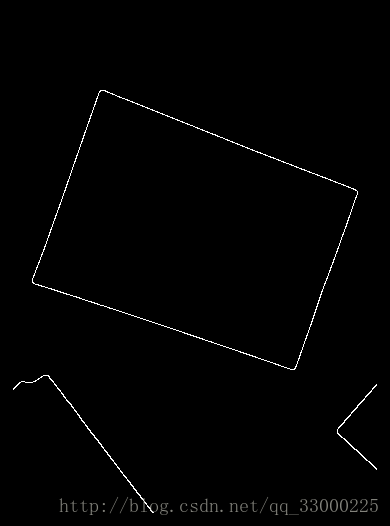
7、把顶点坐标上采样并放回原图,最后4个顶点之间连线,形成边缘
(1)顶点坐标上采样,并放回原图:由于一开始是下采样了8倍,所以这时候将顶点横纵坐标乘8,并在原图画出
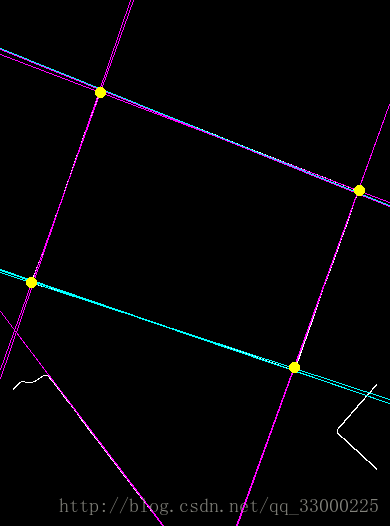
(2)有了4个顶点,怎么连线?可能有同学会想4个点两两连线不就可以了么!但是!!! 对角线呢???对角线不能连。那怎么判断两个点处于对角线位置呢?看下图!
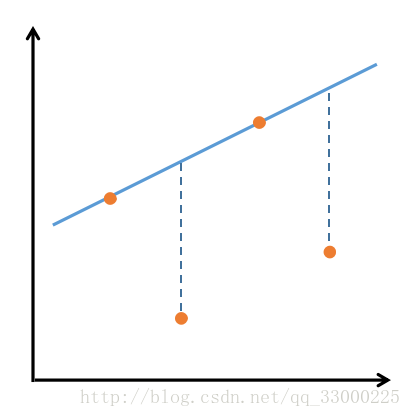
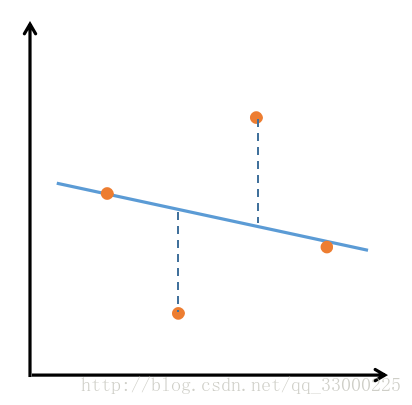
是不是有idea了~~对了!若是对角线连线,另外两个点肯定一个在连线的上方,一个在下方!用y坐标减一下就能识别了!找到对角点,就分别跟另外两个点连接就好啦~~
CImg<int> HoughEdgeDetect::getFinallyProcessedImage(const CImg<int>& SrcImg) {
CImg<int> answer = CImg<int>(SrcImg._width, SrcImg._height, 1, 3, 0);
cimg_forXY(answer, x, y) {
answer(x, y, 0) = SrcImg(x, y, 0, 0);
answer(x, y, 1) = SrcImg(x, y, 0, 1);
answer(x, y, 2) = SrcImg(x, y, 0, 2);
}
const double yellow[] = { 255, 255, 0 };
for (int i = 0; i < top4vertexSet.size(); i++) {
answer.draw_circle(top4vertexSet[i].x * DownSampledSize, top4vertexSet[i].y * DownSampledSize, 5 * DownSampledSize, yellow, 1.0f);
}
drawLinesBetweenVertex(answer);
return answer;
}
//给4个顶点之间画直线
void HoughEdgeDetect::drawLinesBetweenVertex(CImg<int>& img) {
const double yellow[] = { 255, 255, 0 };
int crossPoint = 0;
for (int i = 1; i < 4; i++) { //第0个点与第i个点连线
double temp_k = (double)(top4vertexSet[i].y - top4vertexSet[0].y) / (double)(top4vertexSet[i].x - top4vertexSet[0].x);
double temp_b = (double)top4vertexSet[0].y - temp_k * (double)top4vertexSet[0].x;
int flag = 0; //标志为正还是为负
for (int j = 1; j < 4; j++) {
if (j != i) {
//第j个点的y坐标减线上坐标
double diff = (double)top4vertexSet[j].y - (temp_k * (double)top4vertexSet[j].x + temp_b);
if (flag == 0) {
flag = diff > 0 ? 1 : -1;
}
else {
if (flag == 1 && diff <= 0 || flag == -1 && diff > 0) {
crossPoint = i;
break;
}
}
}
}
if (crossPoint != 0)
break;
}
for (int i = 1; i < 4; i++) {
if (i != crossPoint) {
img.draw_line(top4vertexSet[i].x * DownSampledSize, top4vertexSet[i].y * DownSampledSize,
top4vertexSet[0].x * DownSampledSize, top4vertexSet[0].y * DownSampledSize, yellow);
img.draw_line(top4vertexSet[i].x * DownSampledSize, top4vertexSet[i].y * DownSampledSize,
top4vertexSet[crossPoint].x * DownSampledSize, top4vertexSet[crossPoint].y * DownSampledSize, yellow);
}
}
}步骤7结果(最后结果):
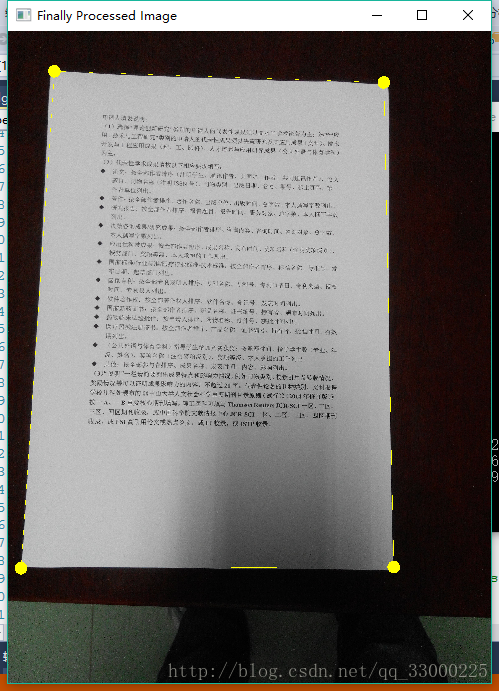
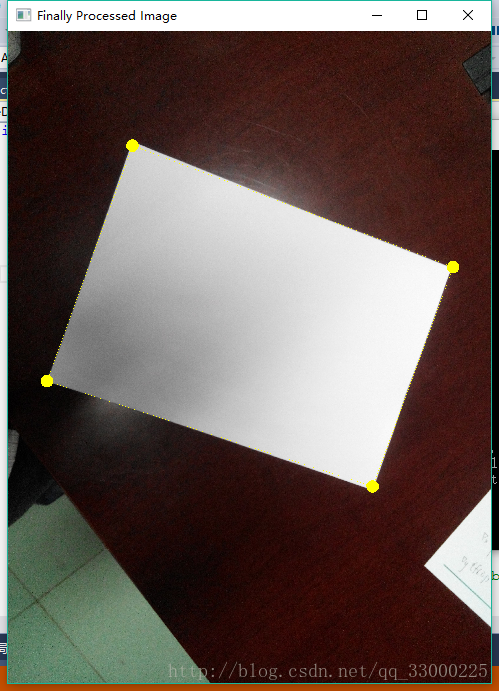
(边缘有点细,小图显示不出来_(:зゝ∠)_)
好啦,搞定~~~














 3336
3336











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









