







本文主要目的是在Ubuntu系统中安装Arduino IDE 和ROS-kinetic rosserial 包 ,还有在Arduino IDE 中安装ros_lib。它们之间关系可以描述为:
Arduino IDE是开源硬件的开发环境,我们通过安装ros_lib使Arduino有了ROS部分接口,可以像ROS的一个节点一样发布消息到串口。ROS通过
rosrun rosserial_python serial_node.py /dev/ttyUSB0启动这个Arduino 硬件节点(当成串口设备处理/serial_node),串口上的消息被roscore接收并路由。
ROS-kinetic上运行的其他节点就可以通过订阅/serial_node节点上的数据,这样就打通了ROS和开源硬件arduino通信。
下面是具体安装过程:
1、安装Arduino IDE
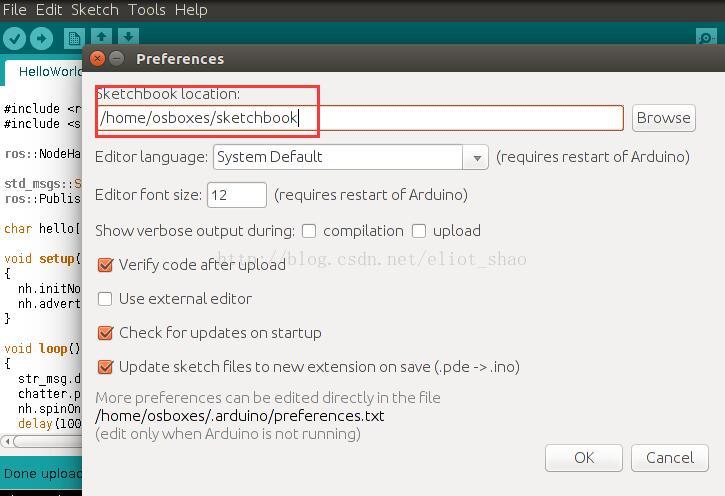
$ sudo apt-get install arduino2、运行并查看arduino库文件路径
$ arduinofile->preference菜单中可以看到自己的sketchbook目录。
3、安装rosserial 包到ros中。
我用的源码的形式安装,这样可以得到最新 的资源。
cd <ws>/src git clone https://github.com/ros-drivers/rosserial.git cd <ws> catkin_make
catkin_make install
在<ws>/install 下面生成一些文件。
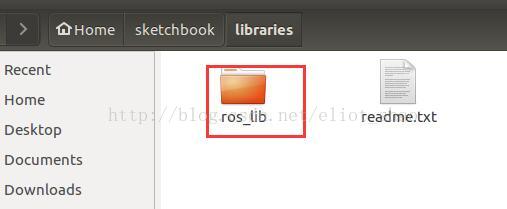
4、安装ros_lib到arduino环境
cd <sketchbook>/libraries rm -rf ros_lib rosrun rosserial_arduino make_libraries.py .此时会在arduino 库文件路径下面看到我们需要的ros_lib
5、运行arduino,检查
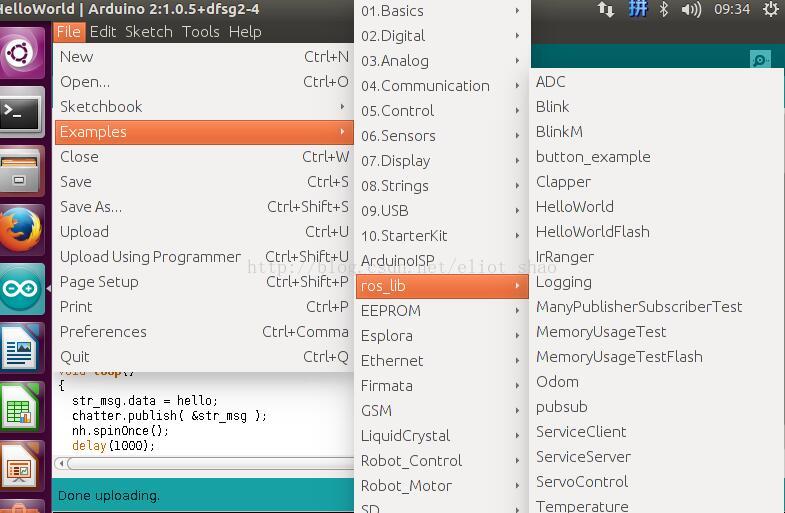
至此所有的安装都已经完成,下面可以使用wiki http://wiki.ros.org/rosserial_arduino/Tutorials/Hello%20World
实现一个hello world,下载到arduino板子上,看看和我们ros其他节点能不能通信成功。














 8192
8192











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









