






C++编程语言是一款应用广泛,支持多种程序设计的计算机编程语言。我们今天就会为大家详细介绍其中C++多态性的一些基本知识,以方便大家在学习过程中对此能够有一个充分的掌握。
多态性可以简单地概括为“一个接口,多种方法”,程序在运行时才决定调用的函数,它是面向对象编程领域的核心概念。多态(polymorphism),字面意思多种形状。C++多态性是通过虚函数来实现的,虚函数允许子类重新定义成员函数,而子类重新定义父类的做法称为覆盖(override),或者称为重写。(这里我觉得要补充,重写的话可以有两种,直接重写成员函数和重写虚函数,只有重写了虚函数的才能算作是体现了C++多态性)而重载则是允许有多个同名的函数,而这些函数的参数列表不同,允许参数个数不同,参数类型不同,或者两者都不同。编译器会根据这些函数的不同列表,将同名的函数的名称做修饰,从而生成一些不同名称的预处理函数,来实现同名函数调用时的重载问题。但这并没有体现多态性。
多态与非多态的实质区别就是函数地址是早绑定还是晚绑定。如果函数的调用,在编译器编译期间就可以确定函数的调用地址,并生产代码,是静态的,就是说地址是早绑定的。而如果函数调用的地址不能在编译器期间确定,需要在运行时才确定,这就属于晚绑定。
那么多态的作用是什么呢,封装可以使得代码模块化,继承可以扩展已存在的代码,他们的目的都是为了代码重用。而多态的目的则是为了接口重用。也就是说,不论传递过来的究竟是那个类的对象,函数都能够通过同一个接口调用到适应各自对象的实现方法。
最常见的用法就是声明基类的指针,利用该指针指向任意一个子类对象,调用相应的虚函数,可以根据指向的子类的不同而实现不同的方法。如果没有使用虚函数的话,即没有利用C++多态性,则利用基类指针调用相应的函数的时候,将总被限制在基类函数本身,而无法调用到子类中被重写过的函数。因为没有多态性,函数调用的地址将是一定的,而固定的地址将始终调用到同一个函数,这就无法实现一个接口,多种方法的目的了。
笔试题目:
- #include<iostream>
- using namespace std;
- class A
- {
- public:
- void foo()
- {
- printf("1\n");
- }
- virtual void fun()
- {
- printf("2\n");
- }
- };
- class B : public A
- {
- public:
- void foo()
- {
- printf("3\n");
- }
- void fun()
- {
- printf("4\n");
- }
- };
- int main(void)
- {
- A a;
- B b;
- A *p = &a;
- p->foo();
- p->fun();
- p = &b;
- p->foo();
- p->fun();
- return 0;
- }
第二个输出结果就是1、4。p->foo()和p->fuu()则是基类指针指向子类对象,正式体现多态的用法,p->foo()由于指针是个基类指针,指向是一个固定偏移量的函数,因此此时指向的就只能是基类的foo()函数的代码了,因此输出的结果还是1。而p->fun()指针是基类指针,指向的fun是一个虚函数,由于每个虚函数都有一个虚函数列表,此时p调用fun()并不是直接调用函数,而是通过虚函数列表找到相应的函数的地址,因此根据指向的对象不同,函数地址也将不同,这里将找到对应的子类的fun()函数的地址,因此输出的结果也会是子类的结果4。
笔试的题目中还有一个另类测试方法。即
B *ptr = (B *)&a; ptr->foo(); ptr->fun();
问这两调用的输出结果。这是一个用子类的指针去指向一个强制转换为子类地址的基类对象。结果,这两句调用的输出结果是3,2。
并不是很理解这种用法,从原理上来解释,由于B是子类指针,虽然被赋予了基类对象地址,但是ptr->foo()在调用的时候,由于地址偏移量固定,偏移量是子类对象的偏移量,于是即使在指向了一个基类对象的情况下,还是调用到了子类的函数,虽然可能从始到终都没有子类对象的实例化出现。
而ptr->fun()的调用,可能还是因为C++多态性的原因,由于指向的是一个基类对象,通过虚函数列表的引用,找到了基类中fun()函数的地址,因此调用了基类的函数。由此可见多态性的强大,可以适应各种变化,不论指针是基类的还是子类的,都能找到正确的实现方法。
- //小结:1、有virtual才可能发生多态现象
- // 2、不发生多态(无virtual)调用就按原类型调用
- #include<iostream>
- using namespace std;
- class Base
- {
- public:
- virtual void f(float x)
- {
- cout<<"Base::f(float)"<< x <<endl;
- }
- void g(float x)
- {
- cout<<"Base::g(float)"<< x <<endl;
- }
- void h(float x)
- {
- cout<<"Base::h(float)"<< x <<endl;
- }
- };
- class Derived : public Base
- {
- public:
- virtual void f(float x)
- {
- cout<<"Derived::f(float)"<< x <<endl; //多态、覆盖
- }
- void g(int x)
- {
- cout<<"Derived::g(int)"<< x <<endl; //隐藏
- }
- void h(float x)
- {
- cout<<"Derived::h(float)"<< x <<endl; //隐藏
- }
- };
- int main(void)
- {
- Derived d;
- Base *pb = &d;
- Derived *pd = &d;
- // Good : behavior depends solely on type of the object
- pb->f(3.14f); // Derived::f(float) 3.14
- pd->f(3.14f); // Derived::f(float) 3.14
- // Bad : behavior depends on type of the pointer
- pb->g(3.14f); // Base::g(float) 3.14
- pd->g(3.14f); // Derived::g(int) 3
- // Bad : behavior depends on type of the pointer
- pb->h(3.14f); // Base::h(float) 3.14
- pd->h(3.14f); // Derived::h(float) 3.14
- return 0;
- }
本来仅仅区别重载与覆盖并不算困难,但是C++的隐藏规则使问题复杂性陡然增加。
这里“隐藏”是指派生类的函数屏蔽了与其同名的基类函数,规则如下:
(1)如果派生类的函数与基类的函数同名,但是参数不同。此时,不论有无virtual
关键字,基类的函数将被隐藏(注意别与重载混淆)。
(2)如果派生类的函数与基类的函数同名,并且参数也相同,但是基类函数没有virtual
关键字。此时,基类的函数被隐藏(注意别与覆盖混淆)。
上面的程序中:
(1)函数Derived::f(float)覆盖了Base::f(float)。
(2)函数Derived::g(int)隐藏了Base::g(float),而不是重载。
(3)函数Derived::h(float)隐藏了Base::h(float),而不是覆盖。
C++纯虚函数
一、定义
纯虚函数是在基类中声明的虚函数,它在基类中没有定义,但要求任何派生类都要定义自己的实现方法。在基类中实现纯虚函数的方法是在函数原型后加“=0”
virtual void funtion()=0
二、引入原因
1、为了方便使用多态特性,我们常常需要在基类中定义虚拟函数。
2、在很多情况下,基类本身生成对象是不合情理的。例如,动物作为一个基类可以派生出老虎、孔雀等子类,但动物本身生成对象明显不合常理。
为了解决上述问题,引入了纯虚函数的概念,将函数定义为纯虚函数(方法:virtual ReturnType Function()= 0;),则编译器要求在派生类中必须予以重写以实现多态性。同时含有纯虚拟函数的类称为抽象类,它不能生成对象。这样就很好地解决了上述两个问题。
三、相似概念
1、多态性
指相同对象收到不同消息或不同对象收到相同消息时产生不同的实现动作。C++支持两种多态性:编译时多态性,运行时多态性。
a、编译时多态性:通过重载函数实现
b、运行时多态性:通过虚函数实现。
2、虚函数
虚函数是在基类中被声明为virtual,并在派生类中重新定义的成员函数,可实现成员函数的动态覆盖(Override)
3、抽象类
包含纯虚函数的类称为抽象类。由于抽象类包含了没有定义的纯虚函数,所以不能定义抽象类的对象。
-----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
说明:本文给出的结论均是在VS2010下调试的结果。
一、问题引入
下面的四个类是典型的C++虚继承的基本结构,现在的问题是这四个类对象的sizeof分别是多少?
- class Base{ //虚基类
- public:
- double dou;
- };
- class Derived1 : public virtual Base{ //虚继承
- public:
- double in;
- };
- class Derived2 : public virtual Base{ //虚继承
- public:
- double on;
- };
- class A : public Derived1, public Derived2{
- };
在VS2010下,内存对齐设置为4字节对齐,运行以下代码的结果:
- int main()
- {
- int i = 0xaabbccdd;
- double a = 1, b = 2, c = 3, d = 4;
- Base bobj;
- bobj.dou = 1;
- Derived1 d1obj;
- d1obj.dou = 2;
- d1obj.in = 1;
- Derived2 d2obj;
- d2obj.dou = 3;
- d2obj.on = 1;
- A aobj;
- aobj.dou = 4;
- aobj.in = 1;
- aobj.on = 1;
- cout << sizeof(bobj) << endl;
- cout << sizeof(d1obj) << endl;
- cout << sizeof(d2obj) << endl;
- cout << sizeof(aobj) << endl;
- system("pause");
- }
二、虚基类的内存布局
main函数中的变量i是为了快速定位到栈的存储位置,变量a,b,c,d只是是为了给出double类型的1,2,3,4在内存中的形式,方便后面跟踪各个类对象的成员在内存中的位置。下面的截图是在debug win32下启动调试后得到的栈上的内存布局:
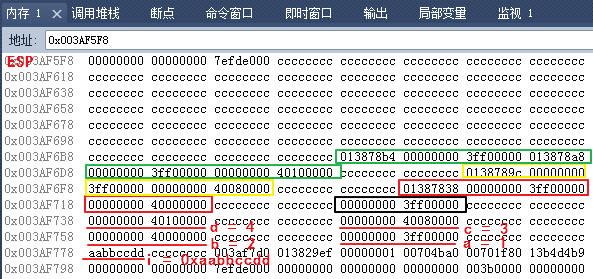
说明:
1、栈上的每个变量间都加入了8个字节的cccccccc cccccccc,这是debug模式下编译器插入的security cookie;
2、黑色框表示的是Base bobj的内存空间,占8字节,存放了double型的变量bobj.dou = 1;
3、红色框表示的是Derived1 d1obj的内存空间,占20个字节:开始的4个字节(0x01387838)是指向虚基类表的指针,后面的八个字节(0x00000000 3ff00000)是double型变量d1obj.in = 1,最后八个字节(0x00000000 40000000)是从虚基类Base继承而来的double型变量d1obj.dou = 2;
4、同理3,黄色框表示的是Derived2 d2obj的内存空间,也是占20个字节:开始的4个字节(0x0138789c)是指向虚基类表的指针,后面的八个字节(0x00000000 3ff00000)是double型变量d2obj.on = 1,最后八个字节(0x00000000 40080000)是从虚基类Base继承而来的double型变量d2obj.dou = 3;
5、绿色框表示的是A aobj的内存空间,共32字节:
开始4个字节(0x013878b4)对应了从Derived1类继承的虚基类表指针,随后的八个字节(0x00000000 3ff00000)是从Derived1中继承的double型变量aobj.in = 1,接下来四字节(0x013878a8)对应了从Derived2类继承的虚基类表指针,之后的八个字节(0x00000000 3ff00000)是从Derived2中继承的double型变量aobj.on = 1,最后八个字节(0x00000000 40100000)则是继承自虚基类Base的double型变量aobj.dou = 4。
观察以上的内存布局可以得出以下结论:
1、在虚继承体系中的派生类内存布局的次序是:虚基类表指针,派生类本身的非static成员变量,继承至虚基类的非static成员变量。虚基类指针放在最前面,而从虚基类继承来的成员则在最后面;
2、类A的对象aobj中确实只持有一份虚基类的成员变量,并没有因同时继承了Derived1和Derived2,而持有两份;那么,如果去掉虚继承,改为普通的继承,aobj的内存布局又会是怎样呢?(去掉代码中的两个virtual关键字,调试一下内存布局,可以发现d1obj,d2obj,aobj的内存空间没有虚基类表指针;如果在代码中用到aobj.dou,会编译报错,说“dou的访问不明确”,需要指明是从那个类继承来的dou,例如:aobj.Derived::dou)。运行非虚继承的代码,可以发现输出结果是:8,16,16,32。原因是没有虚继承,也就没有虚基类指针,d1obj和d2obj的大小变为16字节,而aobj的大小还是32字节,是因为它分别从Derived1和Derived2继承了两份dou。)
3、aobj中会有两个虚基类指针,但编译器只通过其中一个决定虚基类Base的dou变量在aobj中的存放位置。
看到这里,大家也许会有疑问:凭什么说对象的首字节就是虚基类表指针呢?编译器又是怎么通过虚基类表指针控制A的对象只持有一份虚基类的成员变量的呢?接下来,给出相应的汇编指令加以说明。
三、汇编指令
先看Derived1对象相关部分的汇编代码:
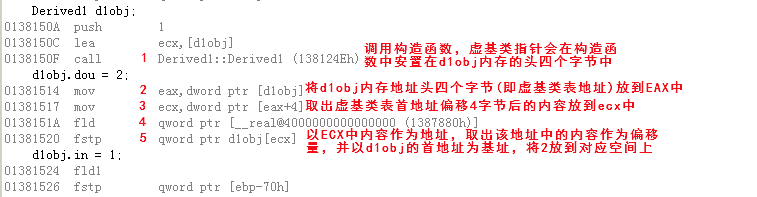
说明:
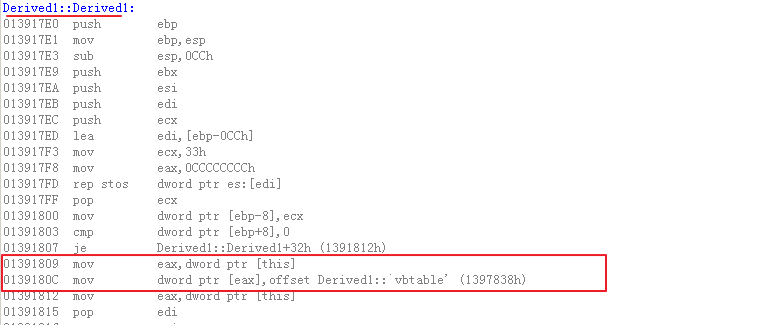
1、执行完构造函数后,虚基类指针即安放好了;
2、d1obj的头四个字节的内容(0x000A7838)给eax,指向完后发现eax = 686136,也就是16进制的0x000A7838;
3、地址0x000A7838 + 4的内容如下图所示:
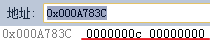
4、5、将2放到了d1obj首地址偏移12(0x0000000c)个字节的位置上,也就是对象d1obj内存的最末端。
也就是说:虚基类表中存放了虚基类的成员在派生类内存空间中的偏移量。
再看看A类对象aobj的相关汇编代码:
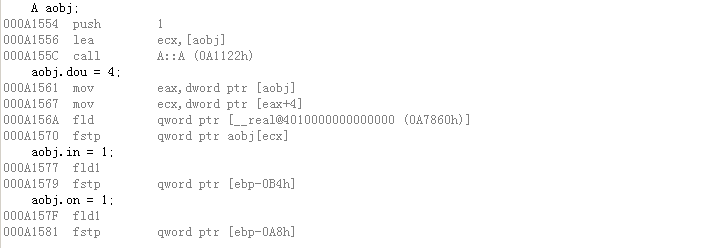
可以发现大致流程和上一段汇编代码差不多,而且确实只通过头四个字节(从Derived1继承的虚基类指针)取出偏移18字节(aobj对象末尾)的dou变量赋值为4。
eax = 0x000a78b4,[eax + 4]的内容如下:

最后再看看构造函数中是如何安放虚基类表指针的,以Derived1类的构造函数为例:















 602
602

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









