






(一)探索导向点指引下的环境探索
通过对环境的分析,相应的信息处理,提取出引导机器人完全探索一系列未知环境的目标点。
探索导向点的提取:
获取激光数据——>提取运动目标点——>探索决策树——>有限的时间内构建出完整或近似完整的环境地图。
几种方法的简单介绍:(力求大体上能懂,最好能实现出来)
1.A Frontier-Based Approach for Autonomous Exploration
检测open space 与 unexplore space 边界点。(这个问题的前期问题就是沿墙移动。在这之前,只能依靠沿墙移动的方式先大致的探索一个图。或者是在环境完全由直线的墙、走廊,圆形的会议室等的环境下探索)
解决的环境:复杂环境下的探索策略。基于栅格地图。证据格方法。
探索解决的关键问题是:Given what you know about the world, where should you move to gain as much new information as possible?
解决的方式:To gain the most new information about the world, move to the boundary between open space and uncharted territory.
①建立证据格
open:occupancy probability (存在概率)<prior probability(先验概率)
unknown:存在概率等于先验概率
occupied:存在概率大于先验概率
(我的理解是,先验概率是0.5.当前有物体障碍存在概率为1.无则存在概率为0)
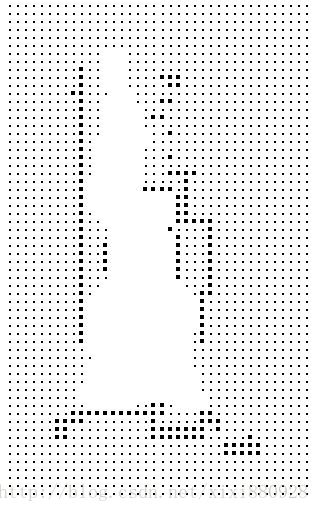
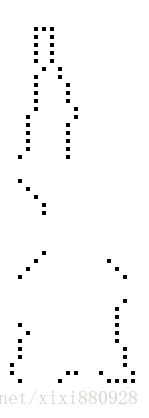
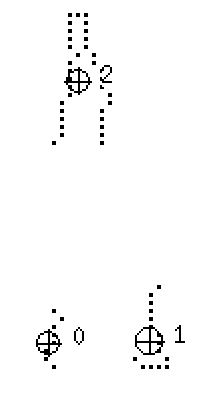
(a) 证据格 (b) 边界 (有障碍物的地方不在运动目标的障碍物内 (c )最小的边界区域
图(c)中0和1对应的是打开的门,2对应的是测不到的走廊尽头。
open space 与unknown space的边界标记为 frontier edge cell,这些cells聚类能形成一个小的区域。这个区域只要大于机器人的尺寸(被定义为最小所需区域),这个区域中点被认为是目标点。
找到目标点之后,机器人向没有访问过的目标点中最近的点移动。
每访问过一个目标点,就将该点加入进已访问的链表。并生成新的证据格。
如果一段时间后仍无法到达边界目标点,则将该点加入list of inaccessible frontiers。再次360扫描,朝下一点走去。
实验:
配有1个激光测距仪、16个声呐传感器、16个红外传感器的机器人。三传感器结合构建证据格,在很近的距离(低于16英寸)完全用红外传感器替代。
红外与声呐主要是用于避障。
以下:占据率较低的为白色空格;占据率未知的为小点;被占据的是黑色大点。
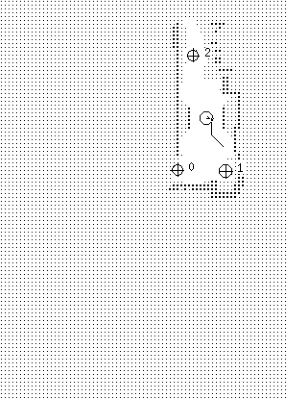
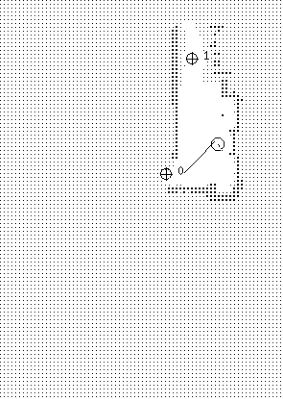
(a)robot从走廊中间开始,发现3个目标点,朝最近的1去 (b)update证据格,发现2个目标点,朝近处的0去。
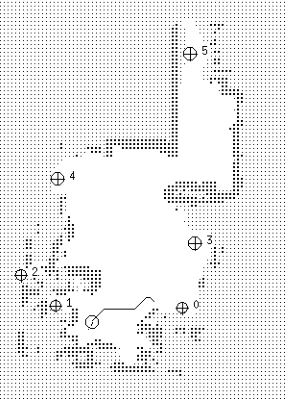
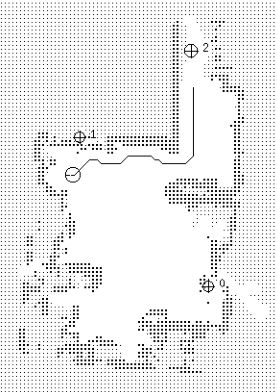
(e)发现6个目标点,但是最近的两个去不了(在桌椅脚) (f)半小时地图建成。所有目标点检测完成,剩下的都是不可到达的。
2. 基于RRT的搜索策略
The SRT Method: Randomized strategies for exploration
to be continue......














 1142
1142











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









