






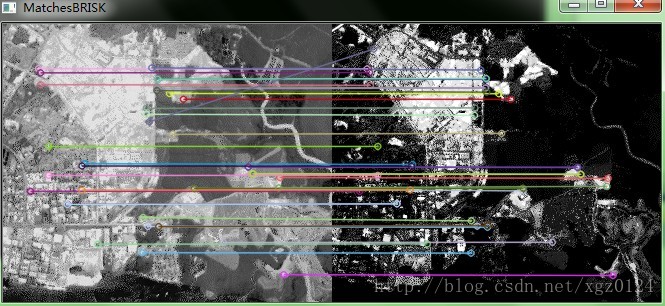
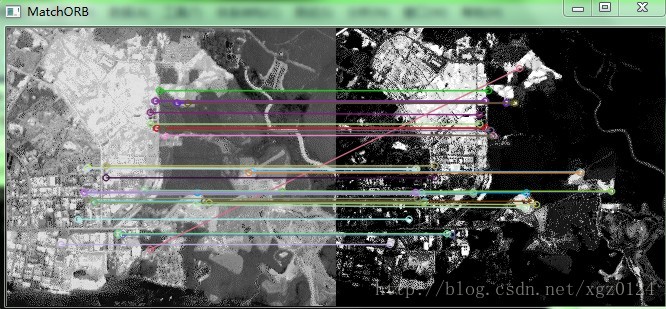
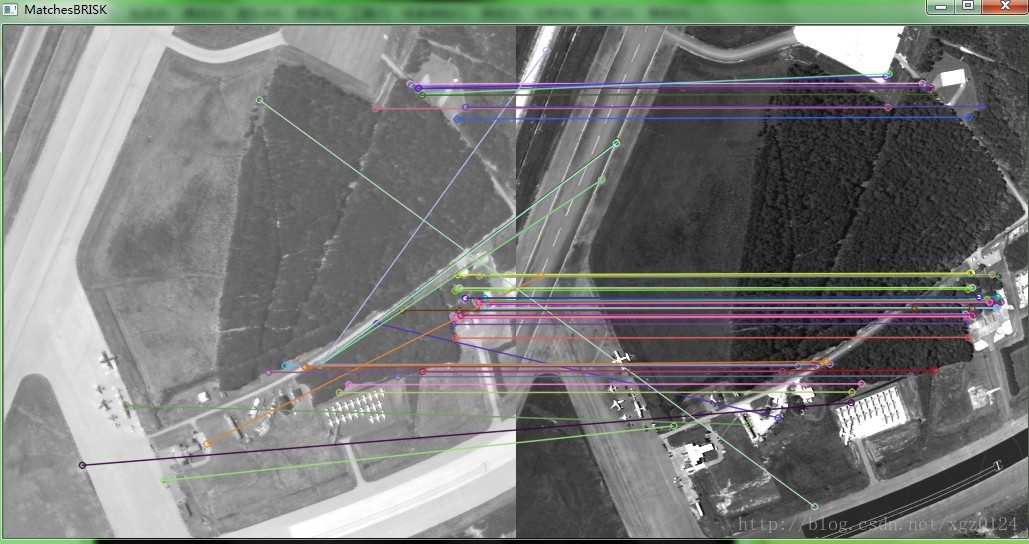

后两张效果就不好了,ORB的参数还要到features2D中修改,具体如何修改还要慢慢尝试,得到最佳值。
#include <opencv2/opencv.hpp>
#include "brisk/brisk.h"
#include <fstream>
#include <iostream>
#include <list>
#include <opencv2/features2d/features2d.hpp>
#include <opencv2/legacy/legacy.hpp>
#include <opencv2/nonfree/features2d.hpp>
#include <opencv2/nonfree/nonfree.hpp>
//standard configuration for the case of no file given
const int n=12;
const float r=2.5; // found 8-9-11, r=3.6, exponent 1.5
void help(char** argv){
std::cout << "This command line tool lets you evaluate different keypoint "
<< "detectors, descriptors and matchers." << std::endl
<< "usage:" << std::endl
<< argv[0] << " <dataset> <2nd> <detector> <descriptor> [descFile1 descFile1]" << std::endl
<< " " << "dataset: Folder containing the images. The images must be of .ppm "<< std::endl
<< " " << " format. They must be named img#.ppm, and there must be "<< std::endl
<< " " << " corresponding homographies named H1to#." << std::endl
<< " " << " You can also use the prefix rot-, then 2nd will be the" << std::endl
<< " " << " rotation in degrees." << std::endl
<< " " << "2nd: Number of the 2nd image (the 1st one is always img1.ppm)"<< std::endl
<< " " << " or the rotation in degrees, if rot- used." << std::endl
<< " " << "detector: Feature detector, e.g. AGAST, or BRISK. You can add the "<< std::endl
<< " " << " threshold, e.g. BRISK80 or SURF2000"<< std::endl
<< " " << "descriptor: Feature descriptor, e.g. SURF, BRIEF, BRISK or U-BRISK."<< std::endl
<< " " << "[descFile]: Optional: files with descriptors to act as detected points."<< std::endl;
}
int main(int argc, char ** argv) {
//std::cout<<sizeof(cv::Point2i)<<" "<<sizeof(CvPoint)<<std::endl;
// process command line args
if(argc != 5 && argc != 7 && argc != 1){
help(argv);
return 1;
}
// names of the two image files
std::string fname1;
std::string fname2;
cv::Mat imgRGB1;
cv::Mat imgRGB2;
cv::Mat imgRGB3;
bool do_rot=false;
// standard file extensions
std::vector<std::string> fextensions;
fextensions.push_back(".bmp");
fextensions.push_back(".jpeg");
fextensions.push_back(".jpg");
fextensions.push_back(".jpe");
fextensions.push_back(".jp2");
fextensions.push_back(".png");
fextensions.push_back(".pgm");
fextensions.push_back(".ppm");
fextensions.push_back(".sr");
fextensions.push_back(".ras");
fextensions.push_back(".tiff");
fextensions.push_back(".tif");
// if no arguments are passed:
if(argc==1){
int i=0;
int fextensions_size=fextensions.size();
while(imgRGB1.empty()||imgRGB2.empty()){
fname1 = "input041_1"+fextensions[i];
fname2 = "input041_2"+fextensions[i];
imgRGB1 = cv::imread(fname1);
imgRGB2 = cv::imread(fname2);
i++;
if(i>=fextensions_size) break;
}
if (imgRGB2.empty()||imgRGB2.empty())
{
std::cout<<"image(s) "<<fname1<<", "<<fname2<<" not found." << std::endl;
return 2;
}
}
else{
if(strncmp("rot-", argv[1], 4)==0){
do_rot=true;
int i=0;
int fextensions_size=fextensions.size();
while(imgRGB1.empty()){
fname1 = std::string(argv[1]+4)+"/img1"+fextensions[i];
imgRGB1 = cv::imread(fname1);
i++;
if(i>=fextensions_size) break;
}
if (imgRGB2.empty())
{
std::cout<<"image not found." << std::endl;
return 2;
}
}
else{
int i=0;
int fextensions_size=fextensions.size();
while(imgRGB1.empty()||imgRGB2.empty()){
fname1 = std::string(argv[1])+"/img1"+fextensions[i];
fname2 = std::string(argv[1])+"/img"+std::string(argv[2])+fextensions[i];
imgRGB1 = cv::imread(fname1);
imgRGB2 = cv::imread(fname2);
i++;
if(i>=fextensions_size) break;
}
if (imgRGB2.empty()||imgRGB2.empty())
{
std::cout<<"image(s)"<<fname1<<", "<<fname2<<" not found." << std::endl;
return 2;
}
}
//unsigned int N=atoi(argv[3]);
if (imgRGB1.empty())
{
fname1 = std::string(argv[1]+4)+"/img1.pgm";
imgRGB1 = cv::imread(fname1);
if (imgRGB1.empty()){
std::cout<<"image not found at " << fname1 << std::endl;
return 2;
}
}
}
// convert to grayscale
cv::Mat imgGray1;
cv::cvtColor(imgRGB1, imgGray1, CV_BGR2GRAY);
cv::Mat imgGray2;
if(!do_rot){
cv::cvtColor(imgRGB2, imgGray2, CV_BGR2GRAY);
}
// run FAST in first image
std::vector<cv::KeyPoint> keypoints, keypoints2;
int threshold;
// create the detector:
cv::Ptr<cv::FeatureDetector> detector;
if(argc==1){
detector = new cv::BriskFeatureDetector(30,4);
}
else{
if(strncmp("FAST", argv[3], 4 )==0){
threshold = atoi(argv[3]+4);
if(threshold==0)
threshold = 30;
detector = new cv::FastFeatureDetector(threshold,true);
}
else if(strncmp("AGAST", argv[3], 5 )==0){
threshold = atoi(argv[3]+5);
if(threshold==0)
threshold = 30;
detector = new cv::BriskFeatureDetector(threshold,0);
}
else if(strncmp("BRISK", argv[3], 5 )==0){
threshold = atoi(argv[3]+5);
if(threshold==0)
threshold = 30;
detector = new cv::BriskFeatureDetector(threshold,4);
}
else if(strncmp("SURF", argv[3], 4 )==0){
threshold = atoi(argv[3]+4);
if(threshold==0)
threshold = 400;
detector = new cv::SurfFeatureDetector(threshold);
}
/*else if(strncmp("SIFT", argv[3], 4 )==0){
float thresh = 0.04 / cv::SIFT::CommonParams::DEFAULT_NOCTAVE_LAYERS / 2.0;
float edgeThreshold=atof(argv[3]+4);
if(edgeThreshold==0)
thresh = 10.0;
detector = new cv::SiftFeatureDetector(thresh,edgeThreshold);
}*/
else{
detector = cv::FeatureDetector::create( argv[3] );
}
if (detector.empty()){
std::cout << "Detector " << argv[3] << " not recognized. Check spelling!" << std::endl;
return 3;
}
}
// run the detector:
if(argc == 7){
// try to read descriptor files
std::string desc1 = std::string(argv[5]);
std::string desc2 = std::string(argv[6]);
std::ifstream descf1(desc1.c_str());
if(!descf1.good()){
std::cout<<"Descriptor file not found at " << desc1<<std::endl;
return 3;
}
std::ifstream descf2(desc2.c_str());
if(!descf2.good()){
std::cout<<"Descriptor file not found at " << desc2<<std::endl;
return 3;
}
// fill the keypoints
std::string str1;
std::stringstream strstrm1;
std::getline(descf1,str1);
std::getline(descf1,str1);
while(!descf1.eof()){
std::getline(descf1,str1);
float x,y,a;
strstrm1.str(str1);
strstrm1>>x;
strstrm1>>y;
strstrm1>>a;
float r=sqrt(1.0/a);
keypoints.push_back(cv::KeyPoint(x, y, 4.0*r));
}
std::string str2;
std::stringstream strstrm2;
std::getline(descf2,str2);
std::getline(descf2,str2);
while(!descf2.eof()){
std::getline(descf2,str2);
float x,y,a;
strstrm2.str(str2);
strstrm2>>x;
strstrm2>>y;
strstrm2>>a;
float r=sqrt(1.0/a);
keypoints2.push_back(cv::KeyPoint(x, y, 4.0*r));
}
// clean up
descf1.close();
descf2.close();
}
else{
detector->detect(imgGray1,keypoints);
detector->detect(imgGray2,keypoints2);
}
// now the extractor:
bool hamming=true;
cv::Ptr<cv::DescriptorExtractor> descriptorExtractor;
// now the extractor:
if(argc==1){
descriptorExtractor = new cv::BriskDescriptorExtractor();
}
else{
if(std::string(argv[4])=="BRISK"){
descriptorExtractor = new cv::BriskDescriptorExtractor();
}
else if(std::string(argv[4])=="U-BRISK"){
descriptorExtractor = new cv::BriskDescriptorExtractor(false);
}
else if(std::string(argv[4])=="SU-BRISK"){
descriptorExtractor = new cv::BriskDescriptorExtractor(false,false);
}
else if(std::string(argv[4])=="S-BRISK"){
descriptorExtractor = new cv::BriskDescriptorExtractor(true,false);
}
else if(std::string(argv[4])=="BRIEF"){
descriptorExtractor = new cv::BriefDescriptorExtractor(64);
}
/*else if(std::string(argv[4])=="CALONDER"){
descriptorExtractor = new cv::CalonderDescriptorExtractor<float>("current.rtc");
hamming=false;
}
else if(std::string(argv[4])=="SURF"){
descriptorExtractor = new cv::SurfDescriptorExtractor();
hamming=false;
}
else if(std::string(argv[4])=="SIFT"){
descriptorExtractor = new cv::SiftDescriptorExtractor();
hamming=false;
}*/
else{
descriptorExtractor = cv::DescriptorExtractor::create( argv[4] );
}
if (descriptorExtractor.empty()){
hamming=false;
std::cout << "Descriptor " << argv[4] << " not recognized. Check spelling!" << std::endl;
return 4;
}
}
// get the descriptors
cv::Mat descriptors, descriptors2;
std::vector<cv::DMatch> indices;
// first image
descriptorExtractor->compute(imgGray2,keypoints2,descriptors2);
// and the second one
descriptorExtractor->compute(imgGray1,keypoints,descriptors);
// matching
std::vector<std::vector<cv::DMatch> > matches;
cv::Ptr<cv::DescriptorMatcher> descriptorMatcher;
//if(hamming)
descriptorMatcher = new cv::BruteForceMatcher<cv::Hamming>();
//else
//descriptorMatcher = new cv::BruteForceMatcher<cv::L2<float> >();
//if(hamming)
descriptorMatcher->radiusMatch(descriptors2,descriptors,matches,90.0);
//else
//descriptorMatcher->radiusMatch(descriptors2,descriptors,matches,0.21);
cv::Mat outimg;
// drawing
// drawMatches(imgRGB2, keypoints2, imgRGB1, keypoints,matches,outimg,
// cv::Scalar(0,255,0), cv::Scalar(0,0,255),
// std::vector<std::vector<char> >(), cv::DrawMatchesFlags::DRAW_RICH_KEYPOINTS );
cv::Mat imgMatch_Brisk;
drawMatches(imgRGB2, keypoints2, imgRGB1, keypoints, matches, imgMatch_Brisk,
cv::Scalar::all(-1), cv::Scalar::all(-1),
std::vector<std::vector<char> >(), cv::DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS);
//cv::namedWindow("Matches");
//cv::imshow("Matches1", outimg);
cv::imshow("MatchesBRISK", imgMatch_Brisk);
cv::waitKey();
return 0;
}















 861
861

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









