







特征矩的知识在概率论和数理统计中有介绍,空间矩的方法在图像应用中比较广泛,包括零阶矩求面积、一阶矩确定重心、二阶矩确定主方向、二阶矩和三阶矩可以推导出七个不变矩Hu不变矩,不变矩具有旋转,平移、缩放等不变性,因此在工业应用和模式识别中得到广泛的应用。
目标物体灰度函数特征矩的公式定义如下:

如果是二值图像,那么f(x,y)就变成
在OpenCV中,可以很方便的计算多边形区域的3阶特征矩,opencv中的矩主要包括以下几种:空间矩,中心矩和中心归一化矩。
class Moments { public: ...... // 空间矩 double m00, m10, m01, m20, m11, m02, m30, m21, m12, m03;// 中心矩double mu20, mu11, mu02, mu30, mu21, mu12, mu03;// 中心归一化矩 double nu20, nu11, nu02, nu30, nu21, nu12, nu03; }空间矩的公式为:

可以知道,对于01二值化的图像,m00即为轮廓的面积。中心矩的公式为:


其中:


归一化的中心矩公式为:



二阶中心距,也叫作方差,它告诉我们一个随机变量在它均值附近波动的大小,方差越大,波动性越大。方差也相当于机械运动中以重心为转轴的转动惯量。(The moment of inertia.)
三阶中心距告诉我们一个随机密度函数向左或向右偏斜的程度。
在均值不为零的情况下,原点距只有纯数学意义。
A2,二阶矩就是 E(X^2)即样本平方均值 ,具体说来就是 A2=(西格玛Xi^2)/n-----(2)
Ak,K阶矩就是 E(X^k)即样本K次方的均值,具体说来就是 Ak=(西格玛Xi^k)/n,-----(3)
不变矩的物理含义:
如果把图像看成是一块质量密度不均匀的薄板,其图像的灰度分布函数f(x,y)就是薄板的密度分布函数,则其各阶矩有着不同的含义,如零阶矩表示它的总质量;一阶矩表示它的质心;二阶矩又叫惯性矩,表示图像的大小和方向。事实上,如果仅考虑阶次为2的矩集,则原始图像等同于一个具有确定的大小、方向和离心率,以图像质心为中心且具有恒定辐射率的椭圆。由三阶矩以下矩构成的七个矩不变量具有平移、旋转和尺度不变性等等。当密度分布函数发生改变时,图像的实质没有改变,仍然可以看做一个薄板,只是密度分布有所改变。虽然此时各阶矩的值可能发生变化,但由各阶矩计算出的不变矩仍具有平移、旋转和尺度不变性。通过这个思想,可对图像进行简化处理,保留最能反映目标特性的信息,再用简化后的图像计算不变矩特征,可减少计算量。
研究表明,只有基于二阶矩的不变矩对二维物体的描述才是真正的与旋转、平移和尺度无关的。较高阶的矩对于成像过程中的误差,微小的变形等因素非常敏感,所以相应的不变矩基本上不能用于有效的物体识别。即使是基于二阶矩的不变矩也只能用来识别外形相差特别大的物理,否则他们的不变矩会因为很相似而不能识别。
在OpenCV中,还可以很方便的得到Hu不变距,Hu不变矩在图像旋转、缩放、平移等操作后,仍能保持矩的不变性,所以有时候用Hu不变距更能识别图像的特征。
1、在数学领域,矩 非常的常见
2、在计算机视觉中,使用2维离散形式的矩计算方法
3、使用矩,可以计算物体的面积,物体的质心等。
4、中心矩的计算方法是:某个矩除以0阶矩
5、高阶矩具有旋转不变性,尺度不变性,变换不变性等。
我们很熟悉概率论中的一阶矩二阶矩高阶矩,但是很多人可能和我一样,不明白图像中矩是拿来干嘛的。

其中M00即零阶矩

OpenCV代码如下所示:
#include <opencv2/opencv.hpp>
using namespace cv;
using namespace std;
Mat src; Mat src_gray;
int thresh = 30;
int max_thresh = 255;
RNG rng(12345);
int main(){
src = imread( "opencv-logo.png" ,CV_LOAD_IMAGE_COLOR );
cvtColor( src, src_gray, CV_BGR2GRAY );//灰度化
GaussianBlur( src, src, Size(3,3), 0.1, 0, BORDER_DEFAULT );
blur( src_gray, src_gray, Size(3,3) ); //滤波
namedWindow( "image", CV_WINDOW_AUTOSIZE );
imshow( "image", src );
moveWindow("image",20,20);
//定义Canny边缘检测图像
Mat canny_output;
vector<vector<Point> > contours;
vector<Vec4i> hierarchy;
//利用canny算法检测边缘
Canny( src_gray, canny_output, thresh, thresh*3, 3 );
namedWindow( "canny", CV_WINDOW_AUTOSIZE );
imshow( "canny", canny_output );
moveWindow("canny",550,20);
//查找轮廓
findContours( canny_output, contours, hierarchy, CV_RETR_TREE, CV_CHAIN_APPROX_SIMPLE, Point(0, 0) );
//计算轮廓矩
vector<Moments> mu(contours.size() );
for( int i = 0; i < contours.size(); i++ )
{ mu[i] = moments( contours[i], false ); }
//计算轮廓的质心
vector<Point2f> mc( contours.size() );
for( int i = 0; i < contours.size(); i++ )
{ mc[i] = Point2d( mu[i].m10/mu[i].m00 , mu[i].m01/mu[i].m00 ); }
//画轮廓及其质心并显示
Mat drawing = Mat::zeros( canny_output.size(), CV_8UC3 );
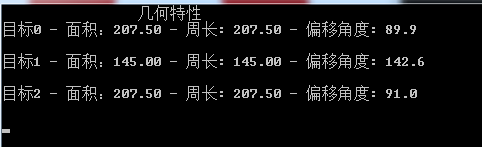
printf("\t\t 几何特性\n");
for( int i = 0; i< contours.size(); i++ )
{
Scalar color = Scalar( rng.uniform(0, 255), rng.uniform(0,255), rng.uniform(0,255) );
drawContours( drawing, contours, i, color, 2, 8, hierarchy, 0, Point() );
circle( drawing, mc[i], 4, color, -1, 8, 0 );
rectangle(drawing, boundingRect(contours.at(i)), cvScalar(0,255,0));
printf("目标%d - 面积:%.2f - 周长: %.2f ", i, mu[i].m00, contourArea(contours[i]), arcLength( contours[i], true ) );
RotatedRect r = fitEllipse(contours.at(i));
double majorAxis = r.size.height > r.size.width ? r.size.height : r.size.width;//长轴大小
double minorAxis = r.size.height > r.size.width ? r.size.width : r.size.height;//短轴大小
double area = mu[i].m00;//面积
int perimeter = arcLength(contours.at(i), true);
double orientation = r.angle;
double orientation_rads = orientation*3.1416/180;
printf("- 偏移角度: %.1f\n\n", orientation);
double diameter = sqrt((4*area)/3.1416);//直径
double eccentricity = sqrt(1-pow(minorAxis/majorAxis,2));//离心率
double roundness = pow(perimeter, 2)/(2*3.1416*area);//圆滑度
line(drawing, Point(mc[i].x, mc[i].y), Point(mc[i].x+30*cos(orientation_rads), mc[i].y+30*sin(orientation_rads)), cvScalar(0,0,200), 3);
char tam[100];
sprintf(tam, "%.2f", orientation);
putText(drawing, tam, Point(mc[i].x, mc[i].y), FONT_HERSHEY_SIMPLEX, 0.5, cvScalar(0,220,120),1.5);
}
namedWindow( "Contours", CV_WINDOW_AUTOSIZE );
imshow( "Contours", drawing );
moveWindow("Contours",1100,20);
waitKey(0);
src.release();
src_gray.release();
return 0;
}
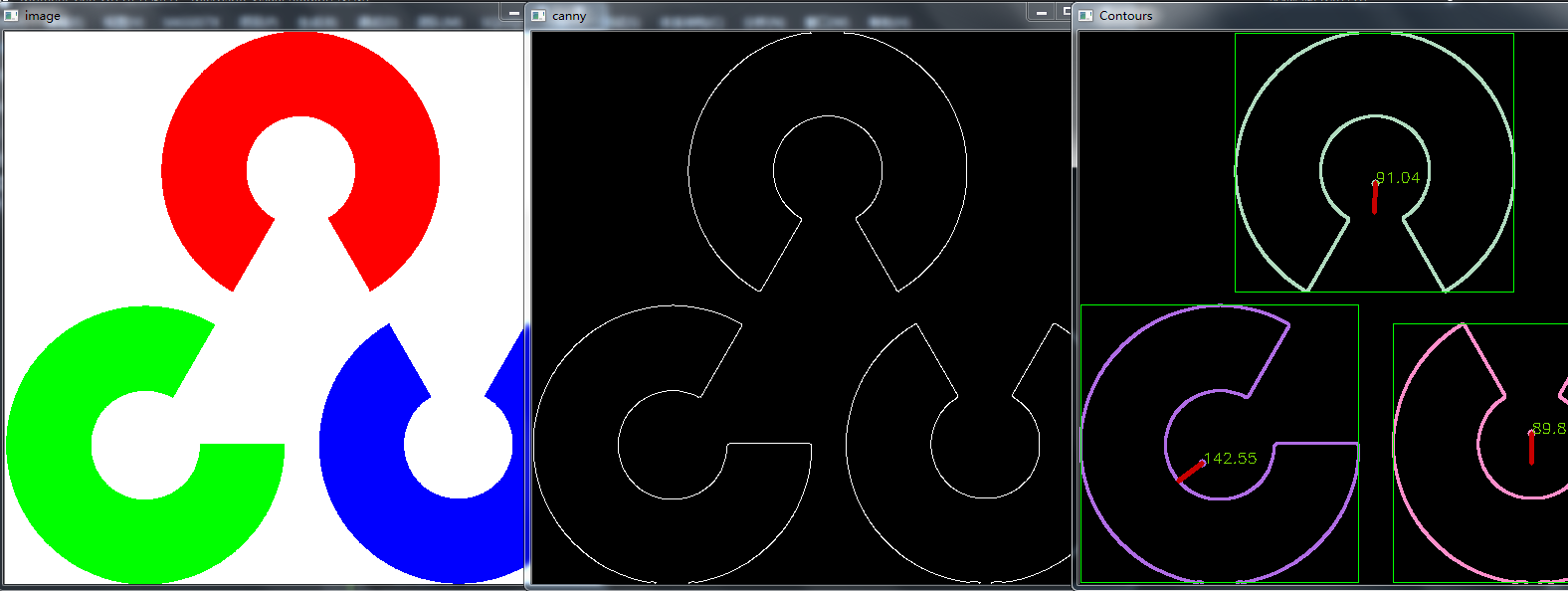
计算得到的第二个目标物面积和周长明显不正确,具体原因有待查找















 1049
1049

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









